|
|
@ -0,0 +1,15 @@
|
|||
#!/bin/bash
|
||||
set -e
|
||||
|
||||
readonly VERSION="3.8"
|
||||
|
||||
version=$(clang-format -version)
|
||||
|
||||
if ! [[ $version == *"$VERSION"* ]]; then
|
||||
echo "clang-format version check failed."
|
||||
echo "a version contains '$VERSION' is needed, but get '$version'"
|
||||
echo "you can install the right version, and make an soft-link to '\$PATH' env"
|
||||
exit -1
|
||||
fi
|
||||
|
||||
clang-format $@
|
||||
|
|
@ -0,0 +1,23 @@
|
|||
# Byte-compiled / optimized / DLL files
|
||||
__pycache__/
|
||||
.ipynb_checkpoints/
|
||||
*.py[cod]
|
||||
*$py.class
|
||||
|
||||
# C extensions
|
||||
*.so
|
||||
|
||||
inference/
|
||||
inference_results/
|
||||
output/
|
||||
|
||||
*.DS_Store
|
||||
*.vs
|
||||
*.user
|
||||
*~
|
||||
*.vscode
|
||||
*.idea
|
||||
|
||||
*.log
|
||||
.clang-format
|
||||
.clang_format.hook
|
||||
217
README.md
|
|
@ -1,2 +1,215 @@
|
|||
# PaddleOCR
|
||||
OCR algorithms with PaddlePaddle (still under develop)
|
||||
English | [简体中文](README_cn.md)
|
||||
|
||||
## Introduction
|
||||
PaddleOCR aims to create rich, leading, and practical OCR tools that help users train better models and apply them into practice.
|
||||
|
||||
**Recent updates**
|
||||
- 2020.7.23, Release the playback and PPT of live class on BiliBili station, PaddleOCR Introduction, [address](https://aistudio.baidu.com/aistudio/course/introduce/1519)
|
||||
- 2020.7.15, Add mobile App demo , support both iOS and Android ( based on easyedge and Paddle Lite)
|
||||
- 2020.7.15, Improve the deployment ability, add the C + + inference , serving deployment. In addtion, the benchmarks of the ultra-lightweight OCR model are provided.
|
||||
- 2020.7.15, Add several related datasets, data annotation and synthesis tools.
|
||||
- 2020.7.9 Add a new model to support recognize the character "space".
|
||||
- 2020.7.9 Add the data augument and learning rate decay strategies during training.
|
||||
- [more](./doc/doc_en/update_en.md)
|
||||
|
||||
## Features
|
||||
- Ultra-lightweight OCR model, total model size is only 8.6M
|
||||
- Single model supports Chinese/English numbers combination recognition, vertical text recognition, long text recognition
|
||||
- Detection model DB (4.1M) + recognition model CRNN (4.5M)
|
||||
- Various text detection algorithms: EAST, DB
|
||||
- Various text recognition algorithms: Rosetta, CRNN, STAR-Net, RARE
|
||||
- Support Linux, Windows, MacOS and other systems.
|
||||
|
||||
## Visualization
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
[More visualization](./doc/doc_en/visualization_en.md)
|
||||
|
||||
You can also quickly experience the ultra-lightweight OCR : [Online Experience](https://www.paddlepaddle.org.cn/hub/scene/ocr)
|
||||
|
||||
Mobile DEMO experience (based on EasyEdge and Paddle-Lite, supports iOS and Android systems): [Sign in the website to obtain the QR code for installing the App](https://ai.baidu.com/easyedge/app/openSource?from=paddlelite)
|
||||
|
||||
Also, you can scan the QR code blow to install the App (**Android support only**)
|
||||
|
||||
<div align="center">
|
||||
<img src="./doc/ocr-android-easyedge.png" width = "200" height = "200" />
|
||||
</div>
|
||||
|
||||
- [**OCR Quick Start**](./doc/doc_en/quickstart_en.md)
|
||||
|
||||
<a name="Supported-Chinese-model-list"></a>
|
||||
|
||||
### Supported Models:
|
||||
|
||||
|Model Name|Description |Detection Model link|Recognition Model link| Support for space Recognition Model link|
|
||||
|-|-|-|-|-|
|
||||
|db_crnn_mobile|ultra-lightweight OCR model|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_det_mv3_db_infer.tar) / [pre-trained model](https://paddleocr.bj.bcebos.com/ch_models/ch_det_mv3_db.tar)|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_infer.tar) / [pre-trained model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn.tar)|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_enhance_infer.tar) / [pre-train model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_enhance.tar)
|
||||
|db_crnn_server|General OCR model|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_det_r50_vd_db_infer.tar) / [pre-trained model](https://paddleocr.bj.bcebos.com/ch_models/ch_det_r50_vd_db.tar)|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_infer.tar) / [pre-trained model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn.tar)|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_enhance_infer.tar) / [pre-train model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_enhance.tar)
|
||||
|
||||
|
||||
## Tutorials
|
||||
- [Installation](./doc/doc_en/installation_en.md)
|
||||
- [Quick Start](./doc/doc_en/quickstart_en.md)
|
||||
- Algorithm introduction
|
||||
- [Text Detection Algorithm](#TEXTDETECTIONALGORITHM)
|
||||
- [Text Recognition Algorithm](#TEXTRECOGNITIONALGORITHM)
|
||||
- [END-TO-END OCR Algorithm](#ENDENDOCRALGORITHM)
|
||||
- Model training/evaluation
|
||||
- [Text Detection](./doc/doc_en/detection_en.md)
|
||||
- [Text Recognition](./doc/doc_en/recognition_en.md)
|
||||
- [Yml Configuration](./doc/doc_en/config_en.md)
|
||||
- [Tricks](./doc/doc_en/tricks_en.md)
|
||||
- Deployment
|
||||
- [Python Inference](./doc/doc_en/inference_en.md)
|
||||
- [C++ Inference](./deploy/cpp_infer/readme_en.md)
|
||||
- [Serving](./doc/doc_en/serving_en.md)
|
||||
- [Mobile](./deploy/lite/readme_en.md)
|
||||
- Model Quantization and Compression (coming soon)
|
||||
- [Benchmark](./doc/doc_en/benchmark_en.md)
|
||||
- Datasets
|
||||
- [General OCR Datasets(Chinese/English)](./doc/doc_en/datasets_en.md)
|
||||
- [HandWritten_OCR_Datasets(Chinese)](./doc/doc_en/handwritten_datasets_en.md)
|
||||
- [Various OCR Datasets(multilingual)](./doc/doc_en/vertical_and_multilingual_datasets_en.md)
|
||||
- [Data Annotation Tools](./doc/doc_en/data_annotation_en.md)
|
||||
- [Data Synthesis Tools](./doc/doc_en/data_synthesis_en.md)
|
||||
- [FAQ](#FAQ)
|
||||
- Visualization
|
||||
- [Ultra-lightweight Chinese/English OCR Visualization](#UCOCRVIS)
|
||||
- [General Chinese/English OCR Visualization](#GeOCRVIS)
|
||||
- [Chinese/English OCR Visualization (Support Space Recognization )](#SpaceOCRVIS)
|
||||
- [Community](#Community)
|
||||
- [References](./doc/doc_en/reference_en.md)
|
||||
- [License](#LICENSE)
|
||||
- [Contribution](#CONTRIBUTION)
|
||||
|
||||
<a name="TEXTDETECTIONALGORITHM"></a>
|
||||
## Text Detection Algorithm
|
||||
|
||||
PaddleOCR open source text detection algorithms list:
|
||||
- [x] EAST([paper](https://arxiv.org/abs/1704.03155))
|
||||
- [x] DB([paper](https://arxiv.org/abs/1911.08947))
|
||||
- [ ] SAST([paper](https://arxiv.org/abs/1908.05498))(Baidu Self-Research, comming soon)
|
||||
|
||||
On the ICDAR2015 dataset, the text detection result is as follows:
|
||||
|
||||
|Model|Backbone|precision|recall|Hmean|Download link|
|
||||
|-|-|-|-|-|-|
|
||||
|EAST|ResNet50_vd|88.18%|85.51%|86.82%|[Download link](https://paddleocr.bj.bcebos.com/det_r50_vd_east.tar)|
|
||||
|EAST|MobileNetV3|81.67%|79.83%|80.74%|[Download link](https://paddleocr.bj.bcebos.com/det_mv3_east.tar)|
|
||||
|DB|ResNet50_vd|83.79%|80.65%|82.19%|[Download link](https://paddleocr.bj.bcebos.com/det_r50_vd_db.tar)|
|
||||
|DB|MobileNetV3|75.92%|73.18%|74.53%|[Download link](https://paddleocr.bj.bcebos.com/det_mv3_db.tar)|
|
||||
|
||||
For use of [LSVT](https://github.com/PaddlePaddle/PaddleOCR/blob/develop/doc/doc_en/datasets_en.md#1-icdar2019-lsvt) street view dataset with a total of 3w training data,the related configuration and pre-trained models for text detection task are as follows:
|
||||
|Model|Backbone|Configuration file|Pre-trained model|
|
||||
|-|-|-|-|
|
||||
|ultra-lightweight OCR model|MobileNetV3|det_mv3_db.yml|[Download link](https://paddleocr.bj.bcebos.com/ch_models/ch_det_mv3_db.tar)|
|
||||
|General OCR model|ResNet50_vd|det_r50_vd_db.yml|[Download link](https://paddleocr.bj.bcebos.com/ch_models/ch_det_r50_vd_db.tar)|
|
||||
|
||||
* Note: For the training and evaluation of the above DB model, post-processing parameters box_thresh=0.6 and unclip_ratio=1.5 need to be set. If using different datasets and different models for training, these two parameters can be adjusted for better result.
|
||||
|
||||
For the training guide and use of PaddleOCR text detection algorithms, please refer to the document [Text detection model training/evaluation/prediction](./doc/doc_en/detection_en.md)
|
||||
|
||||
<a name="TEXTRECOGNITIONALGORITHM"></a>
|
||||
## Text Recognition Algorithm
|
||||
|
||||
PaddleOCR open-source text recognition algorithms list:
|
||||
- [x] CRNN([paper](https://arxiv.org/abs/1507.05717))
|
||||
- [x] Rosetta([paper](https://arxiv.org/abs/1910.05085))
|
||||
- [x] STAR-Net([paper](http://www.bmva.org/bmvc/2016/papers/paper043/index.html))
|
||||
- [x] RARE([paper](https://arxiv.org/abs/1603.03915v1))
|
||||
- [ ] SRN([paper](https://arxiv.org/abs/2003.12294))(Baidu Self-Research, comming soon)
|
||||
|
||||
Refer to [DTRB](https://arxiv.org/abs/1904.01906), the training and evaluation result of these above text recognition (using MJSynth and SynthText for training, evaluate on IIIT, SVT, IC03, IC13, IC15, SVTP, CUTE) is as follow:
|
||||
|
||||
|Model|Backbone|Avg Accuracy|Module combination|Download link|
|
||||
|-|-|-|-|-|
|
||||
|Rosetta|Resnet34_vd|80.24%|rec_r34_vd_none_none_ctc|[Download link](https://paddleocr.bj.bcebos.com/rec_r34_vd_none_none_ctc.tar)|
|
||||
|Rosetta|MobileNetV3|78.16%|rec_mv3_none_none_ctc|[Download link](https://paddleocr.bj.bcebos.com/rec_mv3_none_none_ctc.tar)|
|
||||
|CRNN|Resnet34_vd|82.20%|rec_r34_vd_none_bilstm_ctc|[Download link](https://paddleocr.bj.bcebos.com/rec_r34_vd_none_bilstm_ctc.tar)|
|
||||
|CRNN|MobileNetV3|79.37%|rec_mv3_none_bilstm_ctc|[Download link](https://paddleocr.bj.bcebos.com/rec_mv3_none_bilstm_ctc.tar)|
|
||||
|STAR-Net|Resnet34_vd|83.93%|rec_r34_vd_tps_bilstm_ctc|[Download link](https://paddleocr.bj.bcebos.com/rec_r34_vd_tps_bilstm_ctc.tar)|
|
||||
|STAR-Net|MobileNetV3|81.56%|rec_mv3_tps_bilstm_ctc|[Download link](https://paddleocr.bj.bcebos.com/rec_mv3_tps_bilstm_ctc.tar)|
|
||||
|RARE|Resnet34_vd|84.90%|rec_r34_vd_tps_bilstm_attn|[Download link](https://paddleocr.bj.bcebos.com/rec_r34_vd_tps_bilstm_attn.tar)|
|
||||
|RARE|MobileNetV3|83.32%|rec_mv3_tps_bilstm_attn|[Download link](https://paddleocr.bj.bcebos.com/rec_mv3_tps_bilstm_attn.tar)|
|
||||
|
||||
We use [LSVT](https://github.com/PaddlePaddle/PaddleOCR/blob/develop/doc/doc_en/datasets_en.md#1-icdar2019-lsvt) dataset and cropout 30w traning data from original photos by using position groundtruth and make some calibration needed. In addition, based on the LSVT corpus, 500w synthetic data is generated to train the model. The related configuration and pre-trained models are as follows:
|
||||
|Model|Backbone|Configuration file|Pre-trained model|
|
||||
|-|-|-|-|
|
||||
|ultra-lightweight OCR model|MobileNetV3|rec_chinese_lite_train.yml|[Download link](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn.tar)|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_enhance_infer.tar) & [pre-trained model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_enhance.tar)|
|
||||
|General OCR model|Resnet34_vd|rec_chinese_common_train.yml|[Download link](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn.tar)|[inference model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_enhance_infer.tar) & [pre-trained model](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_enhance.tar)|
|
||||
|
||||
Please refer to the document for training guide and use of PaddleOCR text recognition algorithms [Text recognition model training/evaluation/prediction](./doc/doc_en/recognition_en.md)
|
||||
|
||||
<a name="ENDENDOCRALGORITHM"></a>
|
||||
## END-TO-END OCR Algorithm
|
||||
- [ ] [End2End-PSL](https://arxiv.org/abs/1909.07808)(Baidu Self-Research, comming soon)
|
||||
|
||||
## Visualization
|
||||
|
||||
<a name="UCOCRVIS"></a>
|
||||
### 1.Ultra-lightweight Chinese/English OCR Visualization [more](./doc/doc_en/visualization_en.md)
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/1.jpg" width="800">
|
||||
</div>
|
||||
|
||||
<a name="GeOCRVIS"></a>
|
||||
### 2. General Chinese/English OCR Visualization [more](./doc/doc_en/visualization_en.md)
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/chinese_db_crnn_server/11.jpg" width="800">
|
||||
</div>
|
||||
|
||||
<a name="SpaceOCRVIS"></a>
|
||||
### 3.Chinese/English OCR Visualization (Space_support) [more](./doc/doc_en/visualization_en.md)
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/chinese_db_crnn_server/en_paper.jpg" width="800">
|
||||
</div>
|
||||
|
||||
<a name="FAQ"></a>
|
||||
|
||||
## FAQ
|
||||
1. Error when using attention-based recognition model: KeyError: 'predict'
|
||||
|
||||
The inference of recognition model based on attention loss is still being debugged. For Chinese text recognition, it is recommended to choose the recognition model based on CTC loss first. In practice, it is also found that the recognition model based on attention loss is not as effective as the one based on CTC loss.
|
||||
|
||||
2. About inference speed
|
||||
|
||||
When there are a lot of texts in the picture, the prediction time will increase. You can use `--rec_batch_num` to set a smaller prediction batch size. The default value is 30, which can be changed to 10 or other values.
|
||||
|
||||
3. Service deployment and mobile deployment
|
||||
|
||||
It is expected that the service deployment based on Serving and the mobile deployment based on Paddle Lite will be released successively in mid-to-late June. Stay tuned for more updates.
|
||||
|
||||
4. Release time of self-developed algorithm
|
||||
|
||||
Baidu Self-developed algorithms such as SAST, SRN and end2end PSL will be released in June or July. Please be patient.
|
||||
|
||||
[more](./doc/doc_en/FAQ_en.md)
|
||||
|
||||
<a name="Community"></a>
|
||||
## Community
|
||||
Scan the QR code below with your wechat and completing the questionnaire, you can access to offical technical exchange group.
|
||||
|
||||
<div align="center">
|
||||
<img src="./doc/joinus.jpg" width = "200" height = "200" />
|
||||
</div>
|
||||
|
||||
<a name="LICENSE"></a>
|
||||
## License
|
||||
This project is released under <a href="https://github.com/PaddlePaddle/PaddleOCR/blob/master/LICENSE">Apache 2.0 license</a>
|
||||
|
||||
<a name="CONTRIBUTION"></a>
|
||||
## Contribution
|
||||
We welcome all the contributions to PaddleOCR and appreciate for your feedback very much.
|
||||
|
||||
- Many thanks to [Khanh Tran](https://github.com/xxxpsyduck) for contributing the English documentation.
|
||||
- Many thanks to [zhangxin](https://github.com/ZhangXinNan) for contributing the new visualize function、add .gitgnore and discard set PYTHONPATH manually.
|
||||
- Many thanks to [lyl120117](https://github.com/lyl120117) for contributing the code for printing the network structure.
|
||||
- Thanks [xiangyubo](https://github.com/xiangyubo) for contributing the handwritten Chinese OCR datasets.
|
||||
- Thanks [authorfu](https://github.com/authorfu) for contributing Android demo and [xiadeye](https://github.com/xiadeye) contributing iOS demo, respectively.
|
||||
- Thanks [BeyondYourself](https://github.com/BeyondYourself) for contributing many great suggestions and simplifying part of the code style.
|
||||
|
|
|
|||
|
|
@ -0,0 +1,213 @@
|
|||
[English](README.md) | 简体中文
|
||||
|
||||
## 简介
|
||||
PaddleOCR旨在打造一套丰富、领先、且实用的OCR工具库,助力使用者训练出更好的模型,并应用落地。
|
||||
|
||||
**近期更新**
|
||||
- 2020.7.23 发布7月21日B站直播课回放和PPT,PaddleOCR开源大礼包全面解读,[获取地址](https://aistudio.baidu.com/aistudio/course/introduce/1519)
|
||||
- 2020.7.15 添加基于EasyEdge和Paddle-Lite的移动端DEMO,支持iOS和Android系统
|
||||
- 2020.7.15 完善预测部署,添加基于C++预测引擎推理、服务化部署和端侧部署方案,以及超轻量级中文OCR模型预测耗时Benchmark
|
||||
- 2020.7.15 整理OCR相关数据集、常用数据标注以及合成工具
|
||||
- 2020.7.9 添加支持空格的识别模型,识别效果,预测及训练方式请参考快速开始和文本识别训练相关文档
|
||||
- 2020.7.9 添加数据增强、学习率衰减策略,具体参考[配置文件](./doc/doc_ch/config.md)
|
||||
- [more](./doc/doc_ch/update.md)
|
||||
|
||||
|
||||
## 特性
|
||||
- 超轻量级中文OCR模型,总模型仅8.6M
|
||||
- 单模型支持中英文数字组合识别、竖排文本识别、长文本识别
|
||||
- 检测模型DB(4.1M)+识别模型CRNN(4.5M)
|
||||
- 实用通用中文OCR模型
|
||||
- 多种预测推理部署方案,包括服务部署和端侧部署
|
||||
- 多种文本检测训练算法,EAST、DB
|
||||
- 多种文本识别训练算法,Rosetta、CRNN、STAR-Net、RARE
|
||||
- 可运行于Linux、Windows、MacOS等多种系统
|
||||
|
||||
## 快速体验
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/11.jpg" width="800">
|
||||
</div>
|
||||
|
||||
上图是超轻量级中文OCR模型效果展示,更多效果图请见[效果展示页面](./doc/doc_ch/visualization.md)。
|
||||
|
||||
- 超轻量级中文OCR在线体验地址:https://www.paddlepaddle.org.cn/hub/scene/ocr
|
||||
- 移动端DEMO体验(基于EasyEdge和Paddle-Lite, 支持iOS和Android系统):[安装包二维码获取地址](https://ai.baidu.com/easyedge/app/openSource?from=paddlelite)
|
||||
|
||||
Android手机也可以扫描下面二维码安装体验。
|
||||
|
||||
<div align="center">
|
||||
<img src="./doc/ocr-android-easyedge.png" width = "200" height = "200" />
|
||||
</div>
|
||||
|
||||
- [**中文OCR模型快速使用**](./doc/doc_ch/quickstart.md)
|
||||
|
||||
|
||||
## 中文OCR模型列表
|
||||
|
||||
|模型名称|模型简介|检测模型地址|识别模型地址|支持空格的识别模型地址|
|
||||
|-|-|-|-|-|
|
||||
|chinese_db_crnn_mobile|超轻量级中文OCR模型|[inference模型](https://paddleocr.bj.bcebos.com/ch_models/ch_det_mv3_db_infer.tar) / [预训练模型](https://paddleocr.bj.bcebos.com/ch_models/ch_det_mv3_db.tar)|[inference模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_infer.tar) / [预训练模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn.tar)|[inference模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_enhance_infer.tar) / [预训练模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn_enhance.tar)
|
||||
|chinese_db_crnn_server|通用中文OCR模型|[inference模型](https://paddleocr.bj.bcebos.com/ch_models/ch_det_r50_vd_db_infer.tar) / [预训练模型](https://paddleocr.bj.bcebos.com/ch_models/ch_det_r50_vd_db.tar)|[inference模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_infer.tar) / [预训练模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn.tar)|[inference模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_enhance_infer.tar) / [预训练模型](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn_enhance.tar)
|
||||
|
||||
## 文档教程
|
||||
- [快速安装](./doc/doc_ch/installation.md)
|
||||
- [中文OCR模型快速使用](./doc/doc_ch/quickstart.md)
|
||||
- 算法介绍
|
||||
- [文本检测](#文本检测算法)
|
||||
- [文本识别](#文本识别算法)
|
||||
- [端到端OCR](#端到端OCR算法)
|
||||
- 模型训练/评估
|
||||
- [文本检测](./doc/doc_ch/detection.md)
|
||||
- [文本识别](./doc/doc_ch/recognition.md)
|
||||
- [yml参数配置文件介绍](./doc/doc_ch/config.md)
|
||||
- [中文OCR训练预测技巧](./doc/doc_ch/tricks.md)
|
||||
- 预测部署
|
||||
- [基于Python预测引擎推理](./doc/doc_ch/inference.md)
|
||||
- [基于C++预测引擎推理](./deploy/cpp_infer/readme.md)
|
||||
- [服务化部署](./doc/doc_ch/serving.md)
|
||||
- [端侧部署](./deploy/lite/readme.md)
|
||||
- 模型量化压缩(coming soon)
|
||||
- [Benchmark](./doc/doc_ch/benchmark.md)
|
||||
- 数据集
|
||||
- [通用中英文OCR数据集](./doc/doc_ch/datasets.md)
|
||||
- [手写中文OCR数据集](./doc/doc_ch/handwritten_datasets.md)
|
||||
- [垂类多语言OCR数据集](./doc/doc_ch/vertical_and_multilingual_datasets.md)
|
||||
- [常用数据标注工具](./doc/doc_ch/data_annotation.md)
|
||||
- [常用数据合成工具](./doc/doc_ch/data_synthesis.md)
|
||||
- [FAQ](#FAQ)
|
||||
- 效果展示
|
||||
- [超轻量级中文OCR效果展示](#超轻量级中文OCR效果展示)
|
||||
- [通用中文OCR效果展示](#通用中文OCR效果展示)
|
||||
- [支持空格的中文OCR效果展示](#支持空格的中文OCR效果展示)
|
||||
- [技术交流群](#欢迎加入PaddleOCR技术交流群)
|
||||
- [参考文献](./doc/doc_ch/reference.md)
|
||||
- [许可证书](#许可证书)
|
||||
- [贡献代码](#贡献代码)
|
||||
|
||||
<a name="算法介绍"></a>
|
||||
## 算法介绍
|
||||
<a name="文本检测算法"></a>
|
||||
### 1.文本检测算法
|
||||
|
||||
PaddleOCR开源的文本检测算法列表:
|
||||
- [x] EAST([paper](https://arxiv.org/abs/1704.03155))
|
||||
- [x] DB([paper](https://arxiv.org/abs/1911.08947))
|
||||
- [ ] SAST([paper](https://arxiv.org/abs/1908.05498))(百度自研, coming soon)
|
||||
|
||||
在ICDAR2015文本检测公开数据集上,算法效果如下:
|
||||
|
||||
|模型|骨干网络|precision|recall|Hmean|下载链接|
|
||||
|-|-|-|-|-|-|
|
||||
|EAST|ResNet50_vd|88.18%|85.51%|86.82%|[下载链接](https://paddleocr.bj.bcebos.com/det_r50_vd_east.tar)|
|
||||
|EAST|MobileNetV3|81.67%|79.83%|80.74%|[下载链接](https://paddleocr.bj.bcebos.com/det_mv3_east.tar)|
|
||||
|DB|ResNet50_vd|83.79%|80.65%|82.19%|[下载链接](https://paddleocr.bj.bcebos.com/det_r50_vd_db.tar)|
|
||||
|DB|MobileNetV3|75.92%|73.18%|74.53%|[下载链接](https://paddleocr.bj.bcebos.com/det_mv3_db.tar)|
|
||||
|
||||
使用[LSVT](https://github.com/PaddlePaddle/PaddleOCR/blob/develop/doc/doc_ch/datasets.md#1icdar2019-lsvt)街景数据集共3w张数据,训练中文检测模型的相关配置和预训练文件如下:
|
||||
|模型|骨干网络|配置文件|预训练模型|
|
||||
|-|-|-|-|
|
||||
|超轻量中文模型|MobileNetV3|det_mv3_db.yml|[下载链接](https://paddleocr.bj.bcebos.com/ch_models/ch_det_mv3_db.tar)|
|
||||
|通用中文OCR模型|ResNet50_vd|det_r50_vd_db.yml|[下载链接](https://paddleocr.bj.bcebos.com/ch_models/ch_det_r50_vd_db.tar)|
|
||||
|
||||
* 注: 上述DB模型的训练和评估,需设置后处理参数box_thresh=0.6,unclip_ratio=1.5,使用不同数据集、不同模型训练,可调整这两个参数进行优化
|
||||
|
||||
PaddleOCR文本检测算法的训练和使用请参考文档教程中[模型训练/评估中的文本检测部分](./doc/doc_ch/detection.md)。
|
||||
|
||||
<a name="文本识别算法"></a>
|
||||
### 2.文本识别算法
|
||||
|
||||
PaddleOCR开源的文本识别算法列表:
|
||||
- [x] CRNN([paper](https://arxiv.org/abs/1507.05717))
|
||||
- [x] Rosetta([paper](https://arxiv.org/abs/1910.05085))
|
||||
- [x] STAR-Net([paper](http://www.bmva.org/bmvc/2016/papers/paper043/index.html))
|
||||
- [x] RARE([paper](https://arxiv.org/abs/1603.03915v1))
|
||||
- [ ] SRN([paper](https://arxiv.org/abs/2003.12294))(百度自研, coming soon)
|
||||
|
||||
参考[DTRB](https://arxiv.org/abs/1904.01906)文字识别训练和评估流程,使用MJSynth和SynthText两个文字识别数据集训练,在IIIT, SVT, IC03, IC13, IC15, SVTP, CUTE数据集上进行评估,算法效果如下:
|
||||
|
||||
|模型|骨干网络|Avg Accuracy|模型存储命名|下载链接|
|
||||
|-|-|-|-|-|
|
||||
|Rosetta|Resnet34_vd|80.24%|rec_r34_vd_none_none_ctc|[下载链接](https://paddleocr.bj.bcebos.com/rec_r34_vd_none_none_ctc.tar)|
|
||||
|Rosetta|MobileNetV3|78.16%|rec_mv3_none_none_ctc|[下载链接](https://paddleocr.bj.bcebos.com/rec_mv3_none_none_ctc.tar)|
|
||||
|CRNN|Resnet34_vd|82.20%|rec_r34_vd_none_bilstm_ctc|[下载链接](https://paddleocr.bj.bcebos.com/rec_r34_vd_none_bilstm_ctc.tar)|
|
||||
|CRNN|MobileNetV3|79.37%|rec_mv3_none_bilstm_ctc|[下载链接](https://paddleocr.bj.bcebos.com/rec_mv3_none_bilstm_ctc.tar)|
|
||||
|STAR-Net|Resnet34_vd|83.93%|rec_r34_vd_tps_bilstm_ctc|[下载链接](https://paddleocr.bj.bcebos.com/rec_r34_vd_tps_bilstm_ctc.tar)|
|
||||
|STAR-Net|MobileNetV3|81.56%|rec_mv3_tps_bilstm_ctc|[下载链接](https://paddleocr.bj.bcebos.com/rec_mv3_tps_bilstm_ctc.tar)|
|
||||
|RARE|Resnet34_vd|84.90%|rec_r34_vd_tps_bilstm_attn|[下载链接](https://paddleocr.bj.bcebos.com/rec_r34_vd_tps_bilstm_attn.tar)|
|
||||
|RARE|MobileNetV3|83.32%|rec_mv3_tps_bilstm_attn|[下载链接](https://paddleocr.bj.bcebos.com/rec_mv3_tps_bilstm_attn.tar)|
|
||||
|
||||
使用[LSVT](https://github.com/PaddlePaddle/PaddleOCR/blob/develop/doc/doc_ch/datasets.md#1icdar2019-lsvt)街景数据集根据真值将图crop出来30w数据,进行位置校准。此外基于LSVT语料生成500w合成数据训练中文模型,相关配置和预训练文件如下:
|
||||
|
||||
|模型|骨干网络|配置文件|预训练模型|
|
||||
|-|-|-|-|
|
||||
|超轻量中文模型|MobileNetV3|rec_chinese_lite_train.yml|[下载链接](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_mv3_crnn.tar)|
|
||||
|通用中文OCR模型|Resnet34_vd|rec_chinese_common_train.yml|[下载链接](https://paddleocr.bj.bcebos.com/ch_models/ch_rec_r34_vd_crnn.tar)|
|
||||
|
||||
PaddleOCR文本识别算法的训练和使用请参考文档教程中[模型训练/评估中的文本识别部分](./doc/doc_ch/recognition.md)。
|
||||
|
||||
<a name="端到端OCR算法"></a>
|
||||
### 3.端到端OCR算法
|
||||
- [ ] [End2End-PSL](https://arxiv.org/abs/1909.07808)(百度自研, coming soon)
|
||||
|
||||
## 效果展示
|
||||
|
||||
<a name="超轻量级中文OCR效果展示"></a>
|
||||
### 1.超轻量级中文OCR效果展示 [more](./doc/doc_ch/visualization.md)
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/1.jpg" width="800">
|
||||
</div>
|
||||
|
||||
<a name="通用中文OCR效果展示"></a>
|
||||
### 2.通用中文OCR效果展示 [more](./doc/doc_ch/visualization.md)
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/chinese_db_crnn_server/11.jpg" width="800">
|
||||
</div>
|
||||
|
||||
<a name="支持空格的中文OCR效果展示"></a>
|
||||
### 3.支持空格的中文OCR效果展示 [more](./doc/doc_ch/visualization.md)
|
||||
|
||||
<div align="center">
|
||||
<img src="doc/imgs_results/chinese_db_crnn_server/en_paper.jpg" width="800">
|
||||
</div>
|
||||
|
||||
<a name="FAQ"></a>
|
||||
## FAQ
|
||||
1. **转换attention识别模型时报错:KeyError: 'predict'**
|
||||
问题已解,请更新到最新代码。
|
||||
|
||||
2. **关于推理速度**
|
||||
图片中的文字较多时,预测时间会增,可以使用--rec_batch_num设置更小预测batch num,默认值为30,可以改为10或其他数值。
|
||||
|
||||
3. **服务部署与移动端部署**
|
||||
预计6月中下旬会先后发布基于Serving的服务部署方案和基于Paddle Lite的移动端部署方案,欢迎持续关注。
|
||||
|
||||
4. **自研算法发布时间**
|
||||
自研算法SAST、SRN、End2End-PSL都将在7-8月陆续发布,敬请期待。
|
||||
|
||||
[more](./doc/doc_ch/FAQ.md)
|
||||
|
||||
<a name="欢迎加入PaddleOCR技术交流群"></a>
|
||||
## 欢迎加入PaddleOCR技术交流群
|
||||
请扫描下面二维码,完成问卷填写,获取加群二维码和OCR方向的炼丹秘籍
|
||||
|
||||
<div align="center">
|
||||
<img src="./doc/joinus.jpg" width = "200" height = "200" />
|
||||
</div>
|
||||
|
||||
<a name="许可证书"></a>
|
||||
## 许可证书
|
||||
本项目的发布受<a href="https://github.com/PaddlePaddle/PaddleOCR/blob/master/LICENSE">Apache 2.0 license</a>许可认证。
|
||||
|
||||
<a name="贡献代码"></a>
|
||||
## 贡献代码
|
||||
我们非常欢迎你为PaddleOCR贡献代码,也十分感谢你的反馈。
|
||||
|
||||
- 非常感谢 [Khanh Tran](https://github.com/xxxpsyduck) 贡献了英文文档
|
||||
- 非常感谢 [zhangxin](https://github.com/ZhangXinNan)([Blog](https://blog.csdn.net/sdlypyzq)) 贡献新的可视化方式、添加.gitgnore、处理手动设置PYTHONPATH环境变量的问题
|
||||
- 非常感谢 [lyl120117](https://github.com/lyl120117) 贡献打印网络结构的代码
|
||||
- 非常感谢 [xiangyubo](https://github.com/xiangyubo) 贡献手写中文OCR数据集
|
||||
- 非常感谢 [authorfu](https://github.com/authorfu) 贡献Android和[xiadeye](https://github.com/xiadeye) 贡献IOS的demo代码
|
||||
- 非常感谢 [BeyondYourself](https://github.com/BeyondYourself) 给PaddleOCR提了很多非常棒的建议,并简化了PaddleOCR的部分代码风格。
|
||||
|
|
@ -15,7 +15,7 @@ EvalReader:
|
|||
TestReader:
|
||||
reader_function: ppocr.data.det.dataset_traversal,EvalTestReader
|
||||
process_function: ppocr.data.det.db_process,DBProcessTest
|
||||
single_img_path:
|
||||
infer_img:
|
||||
img_set_dir: ./train_data/icdar2015/text_localization/
|
||||
label_file_path: ./train_data/icdar2015/text_localization/test_icdar2015_label.txt
|
||||
test_image_shape: [736, 1280]
|
||||
|
|
|
|||
|
|
@ -17,7 +17,7 @@ EvalReader:
|
|||
TestReader:
|
||||
reader_function: ppocr.data.det.dataset_traversal,EvalTestReader
|
||||
process_function: ppocr.data.det.east_process,EASTProcessTest
|
||||
single_img_path:
|
||||
infer_img:
|
||||
img_set_dir: ./train_data/icdar2015/text_localization/
|
||||
label_file_path: ./train_data/icdar2015/text_localization/test_icdar2015_label.txt
|
||||
do_eval: True
|
||||
|
|
|
|||
|
|
@ -4,15 +4,18 @@ Global:
|
|||
epoch_num: 1200
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 2
|
||||
save_model_dir: output
|
||||
save_model_dir: ./output/det_db/
|
||||
save_epoch_step: 200
|
||||
eval_batch_step: 5000
|
||||
# evaluation is run every 5000 iterations after the 4000th iteration
|
||||
eval_batch_step: [4000, 5000]
|
||||
train_batch_size_per_card: 16
|
||||
test_batch_size_per_card: 16
|
||||
image_shape: [3, 640, 640]
|
||||
reader_yml: ./configs/det/det_db_icdar15_reader.yml
|
||||
pretrain_weights: ./pretrain_models/MobileNetV3_pretrained/MobileNetV3_large_x0_5_pretrained/
|
||||
save_res_path: ./output/predicts_db.txt
|
||||
pretrain_weights: ./pretrain_models/MobileNetV3_large_x0_5_pretrained/
|
||||
checkpoints:
|
||||
save_res_path: ./output/det_db/predicts_db.txt
|
||||
save_inference_dir:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.det_model,DetModel
|
||||
|
|
@ -48,4 +51,4 @@ PostProcess:
|
|||
thresh: 0.3
|
||||
box_thresh: 0.7
|
||||
max_candidates: 1000
|
||||
unclip_ratio: 1.5
|
||||
unclip_ratio: 2.0
|
||||
|
|
@ -4,15 +4,17 @@ Global:
|
|||
epoch_num: 100000
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 5
|
||||
save_model_dir: output
|
||||
save_model_dir: ./output/det_east/
|
||||
save_epoch_step: 200
|
||||
eval_batch_step: 5000
|
||||
eval_batch_step: [5000, 5000]
|
||||
train_batch_size_per_card: 16
|
||||
test_batch_size_per_card: 16
|
||||
image_shape: [3, 512, 512]
|
||||
reader_yml: ./configs/det/det_east_icdar15_reader.yml
|
||||
pretrain_weights: ./pretrain_models/MobileNetV3_pretrained/MobileNetV3_large_x0_5_pretrained/
|
||||
save_res_path: ./output/predicts_east.txt
|
||||
pretrain_weights: ./pretrain_models/MobileNetV3_large_x0_5_pretrained/
|
||||
checkpoints:
|
||||
save_res_path: ./output/det_east/predicts_east.txt
|
||||
save_inference_dir:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.det_model,DetModel
|
||||
|
|
@ -40,4 +42,4 @@ PostProcess:
|
|||
score_thresh: 0.8
|
||||
cover_thresh: 0.1
|
||||
nms_thresh: 0.2
|
||||
|
||||
|
||||
|
|
@ -4,16 +4,18 @@ Global:
|
|||
epoch_num: 1200
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 2
|
||||
save_model_dir: output
|
||||
save_model_dir: ./output/det_db/
|
||||
save_epoch_step: 200
|
||||
eval_batch_step: 5000
|
||||
eval_batch_step: [5000, 5000]
|
||||
train_batch_size_per_card: 8
|
||||
test_batch_size_per_card: 16
|
||||
image_shape: [3, 640, 640]
|
||||
reader_yml: ./configs/det/det_db_icdar15_reader.yml
|
||||
pretrain_weights: ./pretrain_models/ResNet50_vd_pretrained/
|
||||
save_res_path: ./output/predicts_db.txt
|
||||
|
||||
pretrain_weights: ./pretrain_models/ResNet50_vd_ssld_pretrained/
|
||||
save_res_path: ./output/det_db/predicts_db.txt
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.det_model,DetModel
|
||||
|
||||
|
|
@ -48,4 +50,4 @@ PostProcess:
|
|||
box_thresh: 0.7
|
||||
max_candidates: 1000
|
||||
unclip_ratio: 1.5
|
||||
|
||||
|
||||
|
|
@ -4,16 +4,18 @@ Global:
|
|||
epoch_num: 100000
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 5
|
||||
save_model_dir: output
|
||||
save_model_dir: ./output/det_east/
|
||||
save_epoch_step: 200
|
||||
eval_batch_step: 5000
|
||||
eval_batch_step: [5000, 5000]
|
||||
train_batch_size_per_card: 8
|
||||
test_batch_size_per_card: 16
|
||||
image_shape: [3, 512, 512]
|
||||
reader_yml: ./configs/det/det_east_icdar15_reader.yml
|
||||
pretrain_weights: ./pretrain_models/ResNet50_vd_pretrained/
|
||||
save_res_path: ./output/predicts_east.txt
|
||||
|
||||
pretrain_weights: ./pretrain_models/ResNet50_vd_ssld_pretrained/
|
||||
save_res_path: ./output/det_east/predicts_east.txt
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.det_model,DetModel
|
||||
|
||||
|
|
@ -39,4 +41,4 @@ PostProcess:
|
|||
score_thresh: 0.8
|
||||
cover_thresh: 0.1
|
||||
nms_thresh: 0.2
|
||||
|
||||
|
||||
|
|
@ -9,4 +9,4 @@ EvalReader:
|
|||
|
||||
TestReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,LMDBReader
|
||||
lmdb_sets_dir: ./train_data/data_lmdb_release/evaluation/
|
||||
lmdb_sets_dir: ./train_data/data_lmdb_release/evaluation/
|
||||
|
|
|
|||
|
|
@ -0,0 +1,45 @@
|
|||
Global:
|
||||
algorithm: CRNN
|
||||
use_gpu: true
|
||||
epoch_num: 3000
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: ./output/rec_CRNN
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 128
|
||||
test_batch_size_per_card: 128
|
||||
image_shape: [3, 32, 320]
|
||||
max_text_length: 25
|
||||
character_type: ch
|
||||
character_dict_path: ./ppocr/utils/ppocr_keys_v1.txt
|
||||
loss_type: ctc
|
||||
distort: false
|
||||
use_space_char: false
|
||||
reader_yml: ./configs/rec/rec_chinese_reader.yml
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
||||
Backbone:
|
||||
function: ppocr.modeling.backbones.rec_resnet_vd,ResNet
|
||||
layers: 34
|
||||
|
||||
Head:
|
||||
function: ppocr.modeling.heads.rec_ctc_head,CTCPredict
|
||||
encoder_type: rnn
|
||||
SeqRNN:
|
||||
hidden_size: 256
|
||||
|
||||
Loss:
|
||||
function: ppocr.modeling.losses.rec_ctc_loss,CTCLoss
|
||||
|
||||
Optimizer:
|
||||
function: ppocr.optimizer,AdamDecay
|
||||
base_lr: 0.0005
|
||||
beta1: 0.9
|
||||
beta2: 0.999
|
||||
|
|
@ -1,23 +1,27 @@
|
|||
Global:
|
||||
algorithm: CRNN
|
||||
dataset: common
|
||||
use_gpu: true
|
||||
epoch_num: 300
|
||||
epoch_num: 3000
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: ./output/rec_CRNN
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
test_batch_size_per_card: 256
|
||||
image_shape: [3, 32, 100]
|
||||
image_shape: [3, 32, 320]
|
||||
max_text_length: 25
|
||||
character_type: ch
|
||||
character_dict_path: ./ppocr/utils/ppocr_keys_v1.txt
|
||||
loss_type: ctc
|
||||
distort: false
|
||||
use_space_char: false
|
||||
reader_yml: ./configs/rec/rec_chinese_reader.yml
|
||||
pretrain_weights:
|
||||
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
||||
|
|
@ -37,6 +41,6 @@ Loss:
|
|||
|
||||
Optimizer:
|
||||
function: ppocr.optimizer,AdamDecay
|
||||
base_lr: 0.001
|
||||
base_lr: 0.0005
|
||||
beta1: 0.9
|
||||
beta2: 0.999
|
||||
|
|
|
|||
|
|
@ -1,14 +1,13 @@
|
|||
TrainReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,SimpleReader
|
||||
num_workers: 8
|
||||
img_set_dir: .
|
||||
label_file_path: ./train_data/hard_label.txt
|
||||
img_set_dir: ./train_data
|
||||
label_file_path: ./train_data/rec_gt_train.txt
|
||||
|
||||
EvalReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,SimpleReader
|
||||
img_set_dir: .
|
||||
label_file_path: ./train_data/label_val_all.txt
|
||||
img_set_dir: ./train_data
|
||||
label_file_path: ./train_data/rec_gt_test.txt
|
||||
|
||||
TestReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,SimpleReader
|
||||
infer_img: ./infer_img
|
||||
|
|
|
|||
|
|
@ -0,0 +1,13 @@
|
|||
TrainReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,SimpleReader
|
||||
num_workers: 8
|
||||
img_set_dir: ./train_data/ic15_data
|
||||
label_file_path: ./train_data/ic15_data/rec_gt_train.txt
|
||||
|
||||
EvalReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,SimpleReader
|
||||
img_set_dir: ./train_data/ic15_data
|
||||
label_file_path: ./train_data/ic15_data/rec_gt_test.txt
|
||||
|
||||
TestReader:
|
||||
reader_function: ppocr.data.rec.dataset_traversal,SimpleReader
|
||||
|
|
@ -0,0 +1,49 @@
|
|||
Global:
|
||||
algorithm: CRNN
|
||||
use_gpu: true
|
||||
epoch_num: 1000
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: ./output/rec_CRNN
|
||||
save_epoch_step: 300
|
||||
eval_batch_step: 500
|
||||
train_batch_size_per_card: 256
|
||||
test_batch_size_per_card: 256
|
||||
image_shape: [3, 32, 100]
|
||||
max_text_length: 25
|
||||
character_type: en
|
||||
loss_type: ctc
|
||||
distort: true
|
||||
debug: false
|
||||
reader_yml: ./configs/rec/rec_icdar15_reader.yml
|
||||
pretrain_weights: ./pretrain_models/rec_mv3_none_bilstm_ctc/best_accuracy
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
||||
Backbone:
|
||||
function: ppocr.modeling.backbones.rec_mobilenet_v3,MobileNetV3
|
||||
scale: 0.5
|
||||
model_name: large
|
||||
|
||||
Head:
|
||||
function: ppocr.modeling.heads.rec_ctc_head,CTCPredict
|
||||
encoder_type: rnn
|
||||
SeqRNN:
|
||||
hidden_size: 96
|
||||
|
||||
Loss:
|
||||
function: ppocr.modeling.losses.rec_ctc_loss,CTCLoss
|
||||
|
||||
Optimizer:
|
||||
function: ppocr.optimizer,AdamDecay
|
||||
base_lr: 0.0005
|
||||
beta1: 0.9
|
||||
beta2: 0.999
|
||||
decay:
|
||||
function: cosine_decay
|
||||
step_each_epoch: 20
|
||||
total_epoch: 1000
|
||||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_CRNN
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -14,7 +14,10 @@ Global:
|
|||
character_type: en
|
||||
loss_type: ctc
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_Rosetta
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -15,7 +15,10 @@ Global:
|
|||
loss_type: ctc
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_RARE
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -13,9 +13,14 @@ Global:
|
|||
max_text_length: 25
|
||||
character_type: en
|
||||
loss_type: attention
|
||||
tps: true
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_STARNet
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -13,8 +13,13 @@ Global:
|
|||
max_text_length: 25
|
||||
character_type: en
|
||||
loss_type: ctc
|
||||
tps: true
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_CRNN
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -14,8 +14,12 @@ Global:
|
|||
character_type: en
|
||||
loss_type: ctc
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_Rosetta
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -14,7 +14,10 @@ Global:
|
|||
character_type: en
|
||||
loss_type: ctc
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_RARE
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -13,8 +13,13 @@ Global:
|
|||
max_text_length: 25
|
||||
character_type: en
|
||||
loss_type: attention
|
||||
tps: true
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
|
|
|||
|
|
@ -4,7 +4,7 @@ Global:
|
|||
epoch_num: 72
|
||||
log_smooth_window: 20
|
||||
print_batch_step: 10
|
||||
save_model_dir: output
|
||||
save_model_dir: output/rec_STARNet
|
||||
save_epoch_step: 3
|
||||
eval_batch_step: 2000
|
||||
train_batch_size_per_card: 256
|
||||
|
|
@ -13,8 +13,13 @@ Global:
|
|||
max_text_length: 25
|
||||
character_type: en
|
||||
loss_type: ctc
|
||||
tps: true
|
||||
reader_yml: ./configs/rec/rec_benchmark_reader.yml
|
||||
pretrain_weights:
|
||||
checkpoints:
|
||||
save_inference_dir:
|
||||
infer_img:
|
||||
|
||||
|
||||
Architecture:
|
||||
function: ppocr.modeling.architectures.rec_model,RecModel
|
||||
|
|
|
|||
|
|
@ -0,0 +1,9 @@
|
|||
*.iml
|
||||
.gradle
|
||||
/local.properties
|
||||
/.idea/*
|
||||
.DS_Store
|
||||
/build
|
||||
/captures
|
||||
.externalNativeBuild
|
||||
|
||||
|
|
@ -0,0 +1,19 @@
|
|||
# 如何快速测试
|
||||
### 1. 安装最新版本的Android Studio
|
||||
可以从https://developer.android.com/studio 下载。本Demo使用是4.0版本Android Studio编写。
|
||||
|
||||
### 2. 按照NDK 20 以上版本
|
||||
Demo测试的时候使用的是NDK 20b版本,20版本以上均可以支持编译成功。
|
||||
|
||||
如果您是初学者,可以用以下方式安装和测试NDK编译环境。
|
||||
点击 File -> New ->New Project, 新建 "Native C++" project
|
||||
|
||||
### 3. 导入项目
|
||||
点击 File->New->Import Project..., 然后跟着Android Studio的引导导入
|
||||
|
||||
|
||||
# 获得更多支持
|
||||
前往[端计算模型生成平台EasyEdge](https://ai.baidu.com/easyedge/app/open_source_demo?referrerUrl=paddlelite),获得更多开发支持:
|
||||
|
||||
- Demo APP:可使用手机扫码安装,方便手机端快速体验文字识别
|
||||
- SDK:模型被封装为适配不同芯片硬件和操作系统SDK,包括完善的接口,方便进行二次开发
|
||||
|
|
@ -0,0 +1 @@
|
|||
/build
|
||||
|
|
@ -0,0 +1,94 @@
|
|||
import java.security.MessageDigest
|
||||
|
||||
apply plugin: 'com.android.application'
|
||||
|
||||
android {
|
||||
compileSdkVersion 29
|
||||
defaultConfig {
|
||||
applicationId "com.baidu.paddle.lite.demo.ocr"
|
||||
minSdkVersion 23
|
||||
targetSdkVersion 29
|
||||
versionCode 1
|
||||
versionName "1.0"
|
||||
testInstrumentationRunner "android.support.test.runner.AndroidJUnitRunner"
|
||||
externalNativeBuild {
|
||||
cmake {
|
||||
cppFlags "-std=c++11 -frtti -fexceptions -Wno-format"
|
||||
arguments '-DANDROID_PLATFORM=android-23', '-DANDROID_STL=c++_shared' ,"-DANDROID_ARM_NEON=TRUE"
|
||||
}
|
||||
}
|
||||
ndk {
|
||||
// abiFilters "arm64-v8a", "armeabi-v7a"
|
||||
abiFilters "arm64-v8a", "armeabi-v7a"
|
||||
ldLibs "jnigraphics"
|
||||
}
|
||||
}
|
||||
buildTypes {
|
||||
release {
|
||||
minifyEnabled false
|
||||
proguardFiles getDefaultProguardFile('proguard-android-optimize.txt'), 'proguard-rules.pro'
|
||||
}
|
||||
}
|
||||
externalNativeBuild {
|
||||
cmake {
|
||||
path "src/main/cpp/CMakeLists.txt"
|
||||
version "3.10.2"
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
dependencies {
|
||||
implementation fileTree(include: ['*.jar'], dir: 'libs')
|
||||
implementation 'androidx.appcompat:appcompat:1.1.0'
|
||||
implementation 'androidx.constraintlayout:constraintlayout:1.1.3'
|
||||
testImplementation 'junit:junit:4.12'
|
||||
androidTestImplementation 'com.android.support.test:runner:1.0.2'
|
||||
androidTestImplementation 'com.android.support.test.espresso:espresso-core:3.0.2'
|
||||
}
|
||||
|
||||
def archives = [
|
||||
[
|
||||
'src' : 'https://paddlelite-demo.bj.bcebos.com/libs/android/paddle_lite_libs_v2_6_1.tar.gz',
|
||||
'dest': 'PaddleLite'
|
||||
],
|
||||
[
|
||||
'src' : 'https://paddlelite-demo.bj.bcebos.com/libs/android/opencv-4.2.0-android-sdk.tar.gz',
|
||||
'dest': 'OpenCV'
|
||||
],
|
||||
[
|
||||
'src' : 'https://paddleocr.bj.bcebos.com/deploy/lite/ocr_v1_for_cpu.tar.gz',
|
||||
'dest' : 'src/main/assets/models/ocr_v1_for_cpu'
|
||||
]
|
||||
]
|
||||
|
||||
task downloadAndExtractArchives(type: DefaultTask) {
|
||||
doFirst {
|
||||
println "Downloading and extracting archives including libs and models"
|
||||
}
|
||||
doLast {
|
||||
// Prepare cache folder for archives
|
||||
String cachePath = "cache"
|
||||
if (!file("${cachePath}").exists()) {
|
||||
mkdir "${cachePath}"
|
||||
}
|
||||
archives.eachWithIndex { archive, index ->
|
||||
MessageDigest messageDigest = MessageDigest.getInstance('MD5')
|
||||
messageDigest.update(archive.src.bytes)
|
||||
String cacheName = new BigInteger(1, messageDigest.digest()).toString(32)
|
||||
// Download the target archive if not exists
|
||||
boolean copyFiles = !file("${archive.dest}").exists()
|
||||
if (!file("${cachePath}/${cacheName}.tar.gz").exists()) {
|
||||
ant.get(src: archive.src, dest: file("${cachePath}/${cacheName}.tar.gz"))
|
||||
copyFiles = true; // force to copy files from the latest archive files
|
||||
}
|
||||
// Extract the target archive if its dest path does not exists
|
||||
if (copyFiles) {
|
||||
copy {
|
||||
from tarTree("${cachePath}/${cacheName}.tar.gz")
|
||||
into "${archive.dest}"
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
preBuild.dependsOn downloadAndExtractArchives
|
||||
|
|
@ -0,0 +1,21 @@
|
|||
# Add project specific ProGuard rules here.
|
||||
# You can control the set of applied configuration files using the
|
||||
# proguardFiles setting in build.gradle.
|
||||
#
|
||||
# For more details, see
|
||||
# http://developer.android.com/guide/developing/tools/proguard.html
|
||||
|
||||
# If your project uses WebView with JS, uncomment the following
|
||||
# and specify the fully qualified class name to the JavaScript interface
|
||||
# class:
|
||||
#-keepclassmembers class fqcn.of.javascript.interface.for.webview {
|
||||
# public *;
|
||||
#}
|
||||
|
||||
# Uncomment this to preserve the line number information for
|
||||
# debugging stack traces.
|
||||
#-keepattributes SourceFile,LineNumberTable
|
||||
|
||||
# If you keep the line number information, uncomment this to
|
||||
# hide the original source file name.
|
||||
#-renamesourcefileattribute SourceFile
|
||||
|
|
@ -0,0 +1,26 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.content.Context;
|
||||
import android.support.test.InstrumentationRegistry;
|
||||
import android.support.test.runner.AndroidJUnit4;
|
||||
|
||||
import org.junit.Test;
|
||||
import org.junit.runner.RunWith;
|
||||
|
||||
import static org.junit.Assert.*;
|
||||
|
||||
/**
|
||||
* Instrumented test, which will execute on an Android device.
|
||||
*
|
||||
* @see <a href="http://d.android.com/tools/testing">Testing documentation</a>
|
||||
*/
|
||||
@RunWith(AndroidJUnit4.class)
|
||||
public class ExampleInstrumentedTest {
|
||||
@Test
|
||||
public void useAppContext() {
|
||||
// Context of the app under test.
|
||||
Context appContext = InstrumentationRegistry.getTargetContext();
|
||||
|
||||
assertEquals("com.baidu.paddle.lite.demo", appContext.getPackageName());
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,39 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<manifest xmlns:android="http://schemas.android.com/apk/res/android"
|
||||
package="com.baidu.paddle.lite.demo.ocr">
|
||||
|
||||
<uses-permission android:name="android.permission.WRITE_EXTERNAL_STORAGE"/>
|
||||
<uses-permission android:name="android.permission.READ_EXTERNAL_STORAGE"/>
|
||||
<uses-permission android:name="android.permission.CAMERA"/>
|
||||
|
||||
|
||||
<application
|
||||
android:allowBackup="true"
|
||||
android:icon="@mipmap/ic_launcher"
|
||||
android:label="@string/app_name"
|
||||
android:roundIcon="@mipmap/ic_launcher_round"
|
||||
android:supportsRtl="true"
|
||||
android:theme="@style/AppTheme">
|
||||
<!-- to test MiniActivity, change this to com.baidu.paddle.lite.demo.ocr.MiniActivity -->
|
||||
<activity android:name="com.baidu.paddle.lite.demo.ocr.MainActivity">
|
||||
<intent-filter>
|
||||
<action android:name="android.intent.action.MAIN"/>
|
||||
<category android:name="android.intent.category.LAUNCHER"/>
|
||||
</intent-filter>
|
||||
</activity>
|
||||
<activity
|
||||
android:name="com.baidu.paddle.lite.demo.ocr.SettingsActivity"
|
||||
android:label="Settings">
|
||||
</activity>
|
||||
<provider
|
||||
android:name="androidx.core.content.FileProvider"
|
||||
android:authorities="com.baidu.paddle.lite.demo.ocr.fileprovider"
|
||||
android:exported="false"
|
||||
android:grantUriPermissions="true">
|
||||
<meta-data
|
||||
android:name="android.support.FILE_PROVIDER_PATHS"
|
||||
android:resource="@xml/file_paths"></meta-data>
|
||||
</provider>
|
||||
</application>
|
||||
|
||||
</manifest>
|
||||
{kind=link}
|
After Width: | Height: | Size: 62 KiB |
|
|
@ -0,0 +1,117 @@
|
|||
# For more information about using CMake with Android Studio, read the
|
||||
# documentation: https://d.android.com/studio/projects/add-native-code.html
|
||||
|
||||
# Sets the minimum version of CMake required to build the native library.
|
||||
|
||||
cmake_minimum_required(VERSION 3.4.1)
|
||||
|
||||
# Creates and names a library, sets it as either STATIC or SHARED, and provides
|
||||
# the relative paths to its source code. You can define multiple libraries, and
|
||||
# CMake builds them for you. Gradle automatically packages shared libraries with
|
||||
# your APK.
|
||||
|
||||
set(PaddleLite_DIR "${CMAKE_CURRENT_SOURCE_DIR}/../../../PaddleLite")
|
||||
include_directories(${PaddleLite_DIR}/cxx/include)
|
||||
|
||||
set(OpenCV_DIR "${CMAKE_CURRENT_SOURCE_DIR}/../../../OpenCV/sdk/native/jni")
|
||||
message(STATUS "opencv dir: ${OpenCV_DIR}")
|
||||
find_package(OpenCV REQUIRED)
|
||||
message(STATUS "OpenCV libraries: ${OpenCV_LIBS}")
|
||||
include_directories(${OpenCV_INCLUDE_DIRS})
|
||||
aux_source_directory(. SOURCES)
|
||||
set(CMAKE_CXX_FLAGS
|
||||
"${CMAKE_CXX_FLAGS} -ffast-math -Ofast -Os"
|
||||
)
|
||||
set(CMAKE_CXX_FLAGS
|
||||
"${CMAKE_CXX_FLAGS} -fvisibility=hidden -fvisibility-inlines-hidden -fdata-sections -ffunction-sections"
|
||||
)
|
||||
set(CMAKE_SHARED_LINKER_FLAGS
|
||||
"${CMAKE_SHARED_LINKER_FLAGS} -Wl,--gc-sections -Wl,-z,nocopyreloc")
|
||||
|
||||
add_library(
|
||||
# Sets the name of the library.
|
||||
Native
|
||||
# Sets the library as a shared library.
|
||||
SHARED
|
||||
# Provides a relative path to your source file(s).
|
||||
${SOURCES})
|
||||
|
||||
find_library(
|
||||
# Sets the name of the path variable.
|
||||
log-lib
|
||||
# Specifies the name of the NDK library that you want CMake to locate.
|
||||
log)
|
||||
|
||||
add_library(
|
||||
# Sets the name of the library.
|
||||
paddle_light_api_shared
|
||||
# Sets the library as a shared library.
|
||||
SHARED
|
||||
# Provides a relative path to your source file(s).
|
||||
IMPORTED)
|
||||
|
||||
set_target_properties(
|
||||
# Specifies the target library.
|
||||
paddle_light_api_shared
|
||||
# Specifies the parameter you want to define.
|
||||
PROPERTIES
|
||||
IMPORTED_LOCATION
|
||||
${PaddleLite_DIR}/cxx/libs/${ANDROID_ABI}/libpaddle_light_api_shared.so
|
||||
# Provides the path to the library you want to import.
|
||||
)
|
||||
|
||||
|
||||
# Specifies libraries CMake should link to your target library. You can link
|
||||
# multiple libraries, such as libraries you define in this build script,
|
||||
# prebuilt third-party libraries, or system libraries.
|
||||
|
||||
target_link_libraries(
|
||||
# Specifies the target library.
|
||||
Native
|
||||
paddle_light_api_shared
|
||||
${OpenCV_LIBS}
|
||||
GLESv2
|
||||
EGL
|
||||
jnigraphics
|
||||
${log-lib}
|
||||
)
|
||||
|
||||
add_custom_command(
|
||||
TARGET Native
|
||||
POST_BUILD
|
||||
COMMAND
|
||||
${CMAKE_COMMAND} -E copy
|
||||
${PaddleLite_DIR}/cxx/libs/${ANDROID_ABI}/libc++_shared.so
|
||||
${CMAKE_LIBRARY_OUTPUT_DIRECTORY}/libc++_shared.so)
|
||||
|
||||
add_custom_command(
|
||||
TARGET Native
|
||||
POST_BUILD
|
||||
COMMAND
|
||||
${CMAKE_COMMAND} -E copy
|
||||
${PaddleLite_DIR}/cxx/libs/${ANDROID_ABI}/libpaddle_light_api_shared.so
|
||||
${CMAKE_LIBRARY_OUTPUT_DIRECTORY}/libpaddle_light_api_shared.so)
|
||||
|
||||
add_custom_command(
|
||||
TARGET Native
|
||||
POST_BUILD
|
||||
COMMAND
|
||||
${CMAKE_COMMAND} -E copy
|
||||
${PaddleLite_DIR}/cxx/libs/${ANDROID_ABI}/libhiai.so
|
||||
${CMAKE_LIBRARY_OUTPUT_DIRECTORY}/libhiai.so)
|
||||
|
||||
add_custom_command(
|
||||
TARGET Native
|
||||
POST_BUILD
|
||||
COMMAND
|
||||
${CMAKE_COMMAND} -E copy
|
||||
${PaddleLite_DIR}/cxx/libs/${ANDROID_ABI}/libhiai_ir.so
|
||||
${CMAKE_LIBRARY_OUTPUT_DIRECTORY}/libhiai_ir.so)
|
||||
|
||||
add_custom_command(
|
||||
TARGET Native
|
||||
POST_BUILD
|
||||
COMMAND
|
||||
${CMAKE_COMMAND} -E copy
|
||||
${PaddleLite_DIR}/cxx/libs/${ANDROID_ABI}/libhiai_ir_build.so
|
||||
${CMAKE_LIBRARY_OUTPUT_DIRECTORY}/libhiai_ir_build.so)
|
||||
|
|
@ -0,0 +1,48 @@
|
|||
//
|
||||
// Created by fu on 4/25/18.
|
||||
//
|
||||
|
||||
#pragma once
|
||||
#import <vector>
|
||||
#import <numeric>
|
||||
|
||||
#ifdef __ANDROID__
|
||||
|
||||
#include <android/log.h>
|
||||
|
||||
#define LOG_TAG "OCR_NDK"
|
||||
|
||||
#define LOGI(...) \
|
||||
__android_log_print(ANDROID_LOG_INFO, LOG_TAG, __VA_ARGS__)
|
||||
#define LOGW(...) \
|
||||
__android_log_print(ANDROID_LOG_WARN, LOG_TAG, __VA_ARGS__)
|
||||
#define LOGE(...) \
|
||||
__android_log_print(ANDROID_LOG_ERROR, LOG_TAG, __VA_ARGS__)
|
||||
#else
|
||||
#include <stdio.h>
|
||||
#define LOGI(format, ...) \
|
||||
fprintf(stdout, "[" LOG_TAG "]" format "\n", ##__VA_ARGS__)
|
||||
#define LOGW(format, ...) \
|
||||
fprintf(stdout, "[" LOG_TAG "]" format "\n", ##__VA_ARGS__)
|
||||
#define LOGE(format, ...) \
|
||||
fprintf(stderr, "[" LOG_TAG "]Error: " format "\n", ##__VA_ARGS__)
|
||||
#endif
|
||||
|
||||
enum RETURN_CODE {
|
||||
RETURN_OK = 0
|
||||
};
|
||||
|
||||
enum NET_TYPE{
|
||||
NET_OCR = 900100,
|
||||
NET_OCR_INTERNAL = 991008
|
||||
};
|
||||
|
||||
|
||||
template <typename T>
|
||||
inline T product(const std::vector<T> &vec) {
|
||||
if (vec.empty()){
|
||||
return 0;
|
||||
}
|
||||
return std::accumulate(vec.begin(), vec.end(), 1, std::multiplies<T>());
|
||||
}
|
||||
|
||||
|
|
@ -0,0 +1,115 @@
|
|||
//
|
||||
// Created by fujiayi on 2020/7/5.
|
||||
//
|
||||
|
||||
#include "native.h"
|
||||
#include "ocr_ppredictor.h"
|
||||
#include <string>
|
||||
#include <algorithm>
|
||||
#include <paddle_api.h>
|
||||
|
||||
static paddle::lite_api::PowerMode str_to_cpu_mode(const std::string &cpu_mode);
|
||||
|
||||
extern "C"
|
||||
JNIEXPORT jlong JNICALL
|
||||
Java_com_baidu_paddle_lite_demo_ocr_OCRPredictorNative_init(JNIEnv *env, jobject thiz,
|
||||
jstring j_det_model_path,
|
||||
jstring j_rec_model_path,
|
||||
jint j_thread_num,
|
||||
jstring j_cpu_mode) {
|
||||
std::string det_model_path = jstring_to_cpp_string(env, j_det_model_path);
|
||||
std::string rec_model_path = jstring_to_cpp_string(env, j_rec_model_path);
|
||||
int thread_num = j_thread_num;
|
||||
std::string cpu_mode = jstring_to_cpp_string(env, j_cpu_mode);
|
||||
ppredictor::OCR_Config conf;
|
||||
conf.thread_num = thread_num;
|
||||
conf.mode = str_to_cpu_mode(cpu_mode);
|
||||
ppredictor::OCR_PPredictor *orc_predictor = new ppredictor::OCR_PPredictor{conf};
|
||||
orc_predictor->init_from_file(det_model_path, rec_model_path);
|
||||
return reinterpret_cast<jlong>(orc_predictor);
|
||||
}
|
||||
|
||||
/**
|
||||
* "LITE_POWER_HIGH" convert to paddle::lite_api::LITE_POWER_HIGH
|
||||
* @param cpu_mode
|
||||
* @return
|
||||
*/
|
||||
static paddle::lite_api::PowerMode str_to_cpu_mode(const std::string &cpu_mode) {
|
||||
static std::map<std::string, paddle::lite_api::PowerMode> cpu_mode_map{
|
||||
{"LITE_POWER_HIGH", paddle::lite_api::LITE_POWER_HIGH},
|
||||
{"LITE_POWER_LOW", paddle::lite_api::LITE_POWER_HIGH},
|
||||
{"LITE_POWER_FULL", paddle::lite_api::LITE_POWER_FULL},
|
||||
{"LITE_POWER_NO_BIND", paddle::lite_api::LITE_POWER_NO_BIND},
|
||||
{"LITE_POWER_RAND_HIGH", paddle::lite_api::LITE_POWER_RAND_HIGH},
|
||||
{"LITE_POWER_RAND_LOW", paddle::lite_api::LITE_POWER_RAND_LOW}
|
||||
};
|
||||
std::string upper_key;
|
||||
std::transform(cpu_mode.cbegin(), cpu_mode.cend(), upper_key.begin(), ::toupper);
|
||||
auto index = cpu_mode_map.find(upper_key);
|
||||
if (index == cpu_mode_map.end()) {
|
||||
LOGE("cpu_mode not found %s", upper_key.c_str());
|
||||
return paddle::lite_api::LITE_POWER_HIGH;
|
||||
} else {
|
||||
return index->second;
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
extern "C"
|
||||
JNIEXPORT jfloatArray JNICALL
|
||||
Java_com_baidu_paddle_lite_demo_ocr_OCRPredictorNative_forward(JNIEnv *env, jobject thiz,
|
||||
jlong java_pointer, jfloatArray buf,
|
||||
jfloatArray ddims,
|
||||
jobject original_image) {
|
||||
LOGI("begin to run native forward");
|
||||
if (java_pointer == 0) {
|
||||
LOGE("JAVA pointer is NULL");
|
||||
return cpp_array_to_jfloatarray(env, nullptr, 0);
|
||||
}
|
||||
cv::Mat origin = bitmap_to_cv_mat(env, original_image);
|
||||
if (origin.size == 0) {
|
||||
LOGE("origin bitmap cannot convert to CV Mat");
|
||||
return cpp_array_to_jfloatarray(env, nullptr, 0);
|
||||
}
|
||||
ppredictor::OCR_PPredictor *ppredictor = (ppredictor::OCR_PPredictor *) java_pointer;
|
||||
std::vector<float> dims_float_arr = jfloatarray_to_float_vector(env, ddims);
|
||||
std::vector<int64_t> dims_arr;
|
||||
dims_arr.resize(dims_float_arr.size());
|
||||
std::copy(dims_float_arr.cbegin(), dims_float_arr.cend(), dims_arr.begin());
|
||||
|
||||
// 这里值有点大,就不调用jfloatarray_to_float_vector了
|
||||
int64_t buf_len = (int64_t) env->GetArrayLength(buf);
|
||||
jfloat *buf_data = env->GetFloatArrayElements(buf, JNI_FALSE);
|
||||
float *data = (jfloat *) buf_data;
|
||||
std::vector<ppredictor::OCRPredictResult> results = ppredictor->infer_ocr(dims_arr, data,
|
||||
buf_len,
|
||||
NET_OCR, origin);
|
||||
LOGI("infer_ocr finished with boxes %ld", results.size());
|
||||
// 这里将std::vector<ppredictor::OCRPredictResult> 序列化成 float数组,传输到java层再反序列化
|
||||
std::vector<float> float_arr;
|
||||
for (const ppredictor::OCRPredictResult &r :results) {
|
||||
float_arr.push_back(r.points.size());
|
||||
float_arr.push_back(r.word_index.size());
|
||||
float_arr.push_back(r.score);
|
||||
for (const std::vector<int> &point : r.points) {
|
||||
float_arr.push_back(point.at(0));
|
||||
float_arr.push_back(point.at(1));
|
||||
}
|
||||
for (int index: r.word_index) {
|
||||
float_arr.push_back(index);
|
||||
}
|
||||
}
|
||||
return cpp_array_to_jfloatarray(env, float_arr.data(), float_arr.size());
|
||||
}
|
||||
|
||||
extern "C"
|
||||
JNIEXPORT void JNICALL
|
||||
Java_com_baidu_paddle_lite_demo_ocr_OCRPredictorNative_release(JNIEnv *env, jobject thiz,
|
||||
jlong java_pointer){
|
||||
if (java_pointer == 0) {
|
||||
LOGE("JAVA pointer is NULL");
|
||||
return;
|
||||
}
|
||||
ppredictor::OCR_PPredictor *ppredictor = (ppredictor::OCR_PPredictor *) java_pointer;
|
||||
delete ppredictor;
|
||||
}
|
||||
|
|
@ -0,0 +1,138 @@
|
|||
//
|
||||
// Created by fujiayi on 2020/7/5.
|
||||
//
|
||||
|
||||
#pragma once
|
||||
|
||||
|
||||
#include <jni.h>
|
||||
#include <string>
|
||||
#include <vector>
|
||||
#include <android/bitmap.h>
|
||||
#include <opencv2/opencv.hpp>
|
||||
#include "common.h"
|
||||
|
||||
inline std::string jstring_to_cpp_string(JNIEnv *env, jstring jstr) {
|
||||
// In java, a unicode char will be encoded using 2 bytes (utf16).
|
||||
// so jstring will contain characters utf16. std::string in c++ is
|
||||
// essentially a string of bytes, not characters, so if we want to
|
||||
// pass jstring from JNI to c++, we have convert utf16 to bytes.
|
||||
if (!jstr) {
|
||||
return "";
|
||||
}
|
||||
const jclass stringClass = env->GetObjectClass(jstr);
|
||||
const jmethodID getBytes =
|
||||
env->GetMethodID(stringClass, "getBytes", "(Ljava/lang/String;)[B");
|
||||
const jbyteArray stringJbytes = (jbyteArray) env->CallObjectMethod(
|
||||
jstr, getBytes, env->NewStringUTF("UTF-8"));
|
||||
|
||||
size_t length = (size_t) env->GetArrayLength(stringJbytes);
|
||||
jbyte *pBytes = env->GetByteArrayElements(stringJbytes, NULL);
|
||||
|
||||
std::string ret = std::string(reinterpret_cast<char *>(pBytes), length);
|
||||
env->ReleaseByteArrayElements(stringJbytes, pBytes, JNI_ABORT);
|
||||
|
||||
env->DeleteLocalRef(stringJbytes);
|
||||
env->DeleteLocalRef(stringClass);
|
||||
return ret;
|
||||
}
|
||||
|
||||
inline jstring cpp_string_to_jstring(JNIEnv *env, std::string str) {
|
||||
auto *data = str.c_str();
|
||||
jclass strClass = env->FindClass("java/lang/String");
|
||||
jmethodID strClassInitMethodID =
|
||||
env->GetMethodID(strClass, "<init>", "([BLjava/lang/String;)V");
|
||||
|
||||
jbyteArray bytes = env->NewByteArray(strlen(data));
|
||||
env->SetByteArrayRegion(bytes, 0, strlen(data),
|
||||
reinterpret_cast<const jbyte *>(data));
|
||||
|
||||
jstring encoding = env->NewStringUTF("UTF-8");
|
||||
jstring res = (jstring) (
|
||||
env->NewObject(strClass, strClassInitMethodID, bytes, encoding));
|
||||
|
||||
env->DeleteLocalRef(strClass);
|
||||
env->DeleteLocalRef(encoding);
|
||||
env->DeleteLocalRef(bytes);
|
||||
|
||||
return res;
|
||||
}
|
||||
|
||||
inline jfloatArray cpp_array_to_jfloatarray(JNIEnv *env, const float *buf,
|
||||
int64_t len) {
|
||||
if (len == 0) {
|
||||
return env->NewFloatArray(0);
|
||||
}
|
||||
jfloatArray result = env->NewFloatArray(len);
|
||||
env->SetFloatArrayRegion(result, 0, len, buf);
|
||||
return result;
|
||||
}
|
||||
|
||||
inline jintArray cpp_array_to_jintarray(JNIEnv *env, const int *buf,
|
||||
int64_t len) {
|
||||
jintArray result = env->NewIntArray(len);
|
||||
env->SetIntArrayRegion(result, 0, len, buf);
|
||||
return result;
|
||||
}
|
||||
|
||||
inline jbyteArray cpp_array_to_jbytearray(JNIEnv *env, const int8_t *buf,
|
||||
int64_t len) {
|
||||
jbyteArray result = env->NewByteArray(len);
|
||||
env->SetByteArrayRegion(result, 0, len, buf);
|
||||
return result;
|
||||
}
|
||||
|
||||
inline jlongArray int64_vector_to_jlongarray(JNIEnv *env,
|
||||
const std::vector<int64_t> &vec) {
|
||||
jlongArray result = env->NewLongArray(vec.size());
|
||||
jlong *buf = new jlong[vec.size()];
|
||||
for (size_t i = 0; i < vec.size(); ++i) {
|
||||
buf[i] = (jlong) vec[i];
|
||||
}
|
||||
env->SetLongArrayRegion(result, 0, vec.size(), buf);
|
||||
delete[] buf;
|
||||
return result;
|
||||
}
|
||||
|
||||
inline std::vector<int64_t> jlongarray_to_int64_vector(JNIEnv *env,
|
||||
jlongArray data) {
|
||||
int data_size = env->GetArrayLength(data);
|
||||
jlong *data_ptr = env->GetLongArrayElements(data, nullptr);
|
||||
std::vector<int64_t> data_vec(data_ptr, data_ptr + data_size);
|
||||
env->ReleaseLongArrayElements(data, data_ptr, 0);
|
||||
return data_vec;
|
||||
}
|
||||
|
||||
inline std::vector<float> jfloatarray_to_float_vector(JNIEnv *env,
|
||||
jfloatArray data) {
|
||||
int data_size = env->GetArrayLength(data);
|
||||
jfloat *data_ptr = env->GetFloatArrayElements(data, nullptr);
|
||||
std::vector<float> data_vec(data_ptr, data_ptr + data_size);
|
||||
env->ReleaseFloatArrayElements(data, data_ptr, 0);
|
||||
return data_vec;
|
||||
}
|
||||
|
||||
inline cv::Mat bitmap_to_cv_mat(JNIEnv *env, jobject bitmap) {
|
||||
AndroidBitmapInfo info;
|
||||
int result = AndroidBitmap_getInfo(env, bitmap, &info);
|
||||
if (result != ANDROID_BITMAP_RESULT_SUCCESS) {
|
||||
LOGE("AndroidBitmap_getInfo failed, result: %d", result);
|
||||
return cv::Mat{};
|
||||
}
|
||||
if (info.format != ANDROID_BITMAP_FORMAT_RGBA_8888) {
|
||||
LOGE("Bitmap format is not RGBA_8888 !");
|
||||
return cv::Mat{};
|
||||
}
|
||||
unsigned char *srcData = NULL;
|
||||
AndroidBitmap_lockPixels(env, bitmap, (void **) &srcData);
|
||||
cv::Mat mat = cv::Mat::zeros(info.height, info.width, CV_8UC4);
|
||||
memcpy(mat.data, srcData, info.height * info.width * 4);
|
||||
AndroidBitmap_unlockPixels(env, bitmap);
|
||||
cv::cvtColor(mat, mat, cv::COLOR_RGBA2BGR);
|
||||
/**
|
||||
if (!cv::imwrite("/sdcard/1/copy.jpg", mat)){
|
||||
LOGE("Write image failed " );
|
||||
}
|
||||
*/
|
||||
return mat;
|
||||
}
|
||||
|
|
@ -0,0 +1,547 @@
|
|||
/*******************************************************************************
|
||||
* *
|
||||
* Author : Angus Johnson *
|
||||
* Version : 6.4.2 *
|
||||
* Date : 27 February 2017 *
|
||||
* Website : http://www.angusj.com *
|
||||
* Copyright : Angus Johnson 2010-2017 *
|
||||
* *
|
||||
* License: *
|
||||
* Use, modification & distribution is subject to Boost Software License Ver 1. *
|
||||
* http://www.boost.org/LICENSE_1_0.txt *
|
||||
* *
|
||||
* Attributions: *
|
||||
* The code in this library is an extension of Bala Vatti's clipping algorithm: *
|
||||
* "A generic solution to polygon clipping" *
|
||||
* Communications of the ACM, Vol 35, Issue 7 (July 1992) pp 56-63. *
|
||||
* http://portal.acm.org/citation.cfm?id=129906 *
|
||||
* *
|
||||
* Computer graphics and geometric modeling: implementation and algorithms *
|
||||
* By Max K. Agoston *
|
||||
* Springer; 1 edition (January 4, 2005) *
|
||||
* http://books.google.com/books?q=vatti+clipping+agoston *
|
||||
* *
|
||||
* See also: *
|
||||
* "Polygon Offsetting by Computing Winding Numbers" *
|
||||
* Paper no. DETC2005-85513 pp. 565-575 *
|
||||
* ASME 2005 International Design Engineering Technical Conferences *
|
||||
* and Computers and Information in Engineering Conference (IDETC/CIE2005) *
|
||||
* September 24-28, 2005 , Long Beach, California, USA *
|
||||
* http://www.me.berkeley.edu/~mcmains/pubs/DAC05OffsetPolygon.pdf *
|
||||
* *
|
||||
*******************************************************************************/
|
||||
|
||||
#ifndef clipper_hpp
|
||||
#define clipper_hpp
|
||||
|
||||
#define CLIPPER_VERSION "6.4.2"
|
||||
|
||||
//use_int32: When enabled 32bit ints are used instead of 64bit ints. This
|
||||
//improve performance but coordinate values are limited to the range +/- 46340
|
||||
//#define use_int32
|
||||
|
||||
//use_xyz: adds a Z member to IntPoint. Adds a minor cost to perfomance.
|
||||
//#define use_xyz
|
||||
|
||||
//use_lines: Enables line clipping. Adds a very minor cost to performance.
|
||||
#define use_lines
|
||||
|
||||
//use_deprecated: Enables temporary support for the obsolete functions
|
||||
//#define use_deprecated
|
||||
|
||||
#include <vector>
|
||||
#include <list>
|
||||
#include <set>
|
||||
#include <stdexcept>
|
||||
#include <cstring>
|
||||
#include <cstdlib>
|
||||
#include <ostream>
|
||||
#include <functional>
|
||||
#include <queue>
|
||||
|
||||
namespace ClipperLib {
|
||||
|
||||
enum ClipType {
|
||||
ctIntersection, ctUnion, ctDifference, ctXor
|
||||
};
|
||||
enum PolyType {
|
||||
ptSubject, ptClip
|
||||
};
|
||||
//By far the most widely used winding rules for polygon filling are
|
||||
//EvenOdd & NonZero (GDI, GDI+, XLib, OpenGL, Cairo, AGG, Quartz, SVG, Gr32)
|
||||
//Others rules include Positive, Negative and ABS_GTR_EQ_TWO (only in OpenGL)
|
||||
//see http://glprogramming.com/red/chapter11.html
|
||||
enum PolyFillType {
|
||||
pftEvenOdd, pftNonZero, pftPositive, pftNegative
|
||||
};
|
||||
|
||||
#ifdef use_int32
|
||||
typedef int cInt;
|
||||
static cInt const loRange = 0x7FFF;
|
||||
static cInt const hiRange = 0x7FFF;
|
||||
#else
|
||||
typedef signed long long cInt;
|
||||
static cInt const loRange = 0x3FFFFFFF;
|
||||
static cInt const hiRange = 0x3FFFFFFFFFFFFFFFLL;
|
||||
typedef signed long long long64; //used by Int128 class
|
||||
typedef unsigned long long ulong64;
|
||||
|
||||
#endif
|
||||
|
||||
struct IntPoint {
|
||||
cInt X;
|
||||
cInt Y;
|
||||
#ifdef use_xyz
|
||||
cInt Z;
|
||||
IntPoint(cInt x = 0, cInt y = 0, cInt z = 0): X(x), Y(y), Z(z) {};
|
||||
#else
|
||||
|
||||
IntPoint(cInt x = 0, cInt y = 0) : X(x), Y(y) {};
|
||||
#endif
|
||||
|
||||
friend inline bool operator==(const IntPoint &a, const IntPoint &b) {
|
||||
return a.X == b.X && a.Y == b.Y;
|
||||
}
|
||||
|
||||
friend inline bool operator!=(const IntPoint &a, const IntPoint &b) {
|
||||
return a.X != b.X || a.Y != b.Y;
|
||||
}
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
typedef std::vector <IntPoint> Path;
|
||||
typedef std::vector <Path> Paths;
|
||||
|
||||
inline Path &operator<<(Path &poly, const IntPoint &p) {
|
||||
poly.push_back(p);
|
||||
return poly;
|
||||
}
|
||||
|
||||
inline Paths &operator<<(Paths &polys, const Path &p) {
|
||||
polys.push_back(p);
|
||||
return polys;
|
||||
}
|
||||
|
||||
std::ostream &operator<<(std::ostream &s, const IntPoint &p);
|
||||
|
||||
std::ostream &operator<<(std::ostream &s, const Path &p);
|
||||
|
||||
std::ostream &operator<<(std::ostream &s, const Paths &p);
|
||||
|
||||
struct DoublePoint {
|
||||
double X;
|
||||
double Y;
|
||||
|
||||
DoublePoint(double x = 0, double y = 0) : X(x), Y(y) {}
|
||||
|
||||
DoublePoint(IntPoint ip) : X((double) ip.X), Y((double) ip.Y) {}
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
#ifdef use_xyz
|
||||
typedef void (*ZFillCallback)(IntPoint& e1bot, IntPoint& e1top, IntPoint& e2bot, IntPoint& e2top, IntPoint& pt);
|
||||
#endif
|
||||
|
||||
enum InitOptions {
|
||||
ioReverseSolution = 1, ioStrictlySimple = 2, ioPreserveCollinear = 4
|
||||
};
|
||||
enum JoinType {
|
||||
jtSquare, jtRound, jtMiter
|
||||
};
|
||||
enum EndType {
|
||||
etClosedPolygon, etClosedLine, etOpenButt, etOpenSquare, etOpenRound
|
||||
};
|
||||
|
||||
class PolyNode;
|
||||
|
||||
typedef std::vector<PolyNode *> PolyNodes;
|
||||
|
||||
class PolyNode {
|
||||
public:
|
||||
PolyNode();
|
||||
|
||||
virtual ~PolyNode() {};
|
||||
Path Contour;
|
||||
PolyNodes Childs;
|
||||
PolyNode *Parent;
|
||||
|
||||
PolyNode *GetNext() const;
|
||||
|
||||
bool IsHole() const;
|
||||
|
||||
bool IsOpen() const;
|
||||
|
||||
int ChildCount() const;
|
||||
|
||||
private:
|
||||
//PolyNode& operator =(PolyNode& other);
|
||||
unsigned Index; //node index in Parent.Childs
|
||||
bool m_IsOpen;
|
||||
JoinType m_jointype;
|
||||
EndType m_endtype;
|
||||
|
||||
PolyNode *GetNextSiblingUp() const;
|
||||
|
||||
void AddChild(PolyNode &child);
|
||||
|
||||
friend class Clipper; //to access Index
|
||||
friend class ClipperOffset;
|
||||
};
|
||||
|
||||
class PolyTree : public PolyNode {
|
||||
public:
|
||||
~PolyTree() { Clear(); };
|
||||
|
||||
PolyNode *GetFirst() const;
|
||||
|
||||
void Clear();
|
||||
|
||||
int Total() const;
|
||||
|
||||
private:
|
||||
//PolyTree& operator =(PolyTree& other);
|
||||
PolyNodes AllNodes;
|
||||
|
||||
friend class Clipper; //to access AllNodes
|
||||
};
|
||||
|
||||
bool Orientation(const Path &poly);
|
||||
|
||||
double Area(const Path &poly);
|
||||
|
||||
int PointInPolygon(const IntPoint &pt, const Path &path);
|
||||
|
||||
void SimplifyPolygon(const Path &in_poly, Paths &out_polys, PolyFillType fillType = pftEvenOdd);
|
||||
|
||||
void SimplifyPolygons(const Paths &in_polys, Paths &out_polys, PolyFillType fillType = pftEvenOdd);
|
||||
|
||||
void SimplifyPolygons(Paths &polys, PolyFillType fillType = pftEvenOdd);
|
||||
|
||||
void CleanPolygon(const Path &in_poly, Path &out_poly, double distance = 1.415);
|
||||
|
||||
void CleanPolygon(Path &poly, double distance = 1.415);
|
||||
|
||||
void CleanPolygons(const Paths &in_polys, Paths &out_polys, double distance = 1.415);
|
||||
|
||||
void CleanPolygons(Paths &polys, double distance = 1.415);
|
||||
|
||||
void MinkowskiSum(const Path &pattern, const Path &path, Paths &solution, bool pathIsClosed);
|
||||
|
||||
void MinkowskiSum(const Path &pattern, const Paths &paths, Paths &solution, bool pathIsClosed);
|
||||
|
||||
void MinkowskiDiff(const Path &poly1, const Path &poly2, Paths &solution);
|
||||
|
||||
void PolyTreeToPaths(const PolyTree &polytree, Paths &paths);
|
||||
|
||||
void ClosedPathsFromPolyTree(const PolyTree &polytree, Paths &paths);
|
||||
|
||||
void OpenPathsFromPolyTree(PolyTree &polytree, Paths &paths);
|
||||
|
||||
void ReversePath(Path &p);
|
||||
|
||||
void ReversePaths(Paths &p);
|
||||
|
||||
struct IntRect {
|
||||
cInt left;
|
||||
cInt top;
|
||||
cInt right;
|
||||
cInt bottom;
|
||||
};
|
||||
|
||||
//enums that are used internally ...
|
||||
enum EdgeSide {
|
||||
esLeft = 1, esRight = 2
|
||||
};
|
||||
|
||||
//forward declarations (for stuff used internally) ...
|
||||
struct TEdge;
|
||||
struct IntersectNode;
|
||||
struct LocalMinimum;
|
||||
struct OutPt;
|
||||
struct OutRec;
|
||||
struct Join;
|
||||
|
||||
typedef std::vector<OutRec *> PolyOutList;
|
||||
typedef std::vector<TEdge *> EdgeList;
|
||||
typedef std::vector<Join *> JoinList;
|
||||
typedef std::vector<IntersectNode *> IntersectList;
|
||||
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
//ClipperBase is the ancestor to the Clipper class. It should not be
|
||||
//instantiated directly. This class simply abstracts the conversion of sets of
|
||||
//polygon coordinates into edge objects that are stored in a LocalMinima list.
|
||||
class ClipperBase {
|
||||
public:
|
||||
ClipperBase();
|
||||
|
||||
virtual ~ClipperBase();
|
||||
|
||||
virtual bool AddPath(const Path &pg, PolyType PolyTyp, bool Closed);
|
||||
|
||||
bool AddPaths(const Paths &ppg, PolyType PolyTyp, bool Closed);
|
||||
|
||||
virtual void Clear();
|
||||
|
||||
IntRect GetBounds();
|
||||
|
||||
bool PreserveCollinear() { return m_PreserveCollinear; };
|
||||
|
||||
void PreserveCollinear(bool value) { m_PreserveCollinear = value; };
|
||||
protected:
|
||||
void DisposeLocalMinimaList();
|
||||
|
||||
TEdge *AddBoundsToLML(TEdge *e, bool IsClosed);
|
||||
|
||||
virtual void Reset();
|
||||
|
||||
TEdge *ProcessBound(TEdge *E, bool IsClockwise);
|
||||
|
||||
void InsertScanbeam(const cInt Y);
|
||||
|
||||
bool PopScanbeam(cInt &Y);
|
||||
|
||||
bool LocalMinimaPending();
|
||||
|
||||
bool PopLocalMinima(cInt Y, const LocalMinimum *&locMin);
|
||||
|
||||
OutRec *CreateOutRec();
|
||||
|
||||
void DisposeAllOutRecs();
|
||||
|
||||
void DisposeOutRec(PolyOutList::size_type index);
|
||||
|
||||
void SwapPositionsInAEL(TEdge *edge1, TEdge *edge2);
|
||||
|
||||
void DeleteFromAEL(TEdge *e);
|
||||
|
||||
void UpdateEdgeIntoAEL(TEdge *&e);
|
||||
|
||||
typedef std::vector <LocalMinimum> MinimaList;
|
||||
MinimaList::iterator m_CurrentLM;
|
||||
MinimaList m_MinimaList;
|
||||
|
||||
bool m_UseFullRange;
|
||||
EdgeList m_edges;
|
||||
bool m_PreserveCollinear;
|
||||
bool m_HasOpenPaths;
|
||||
PolyOutList m_PolyOuts;
|
||||
TEdge *m_ActiveEdges;
|
||||
|
||||
typedef std::priority_queue <cInt> ScanbeamList;
|
||||
ScanbeamList m_Scanbeam;
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
class Clipper : public virtual ClipperBase {
|
||||
public:
|
||||
Clipper(int initOptions = 0);
|
||||
|
||||
bool Execute(ClipType clipType,
|
||||
Paths &solution,
|
||||
PolyFillType fillType = pftEvenOdd);
|
||||
|
||||
bool Execute(ClipType clipType,
|
||||
Paths &solution,
|
||||
PolyFillType subjFillType,
|
||||
PolyFillType clipFillType);
|
||||
|
||||
bool Execute(ClipType clipType,
|
||||
PolyTree &polytree,
|
||||
PolyFillType fillType = pftEvenOdd);
|
||||
|
||||
bool Execute(ClipType clipType,
|
||||
PolyTree &polytree,
|
||||
PolyFillType subjFillType,
|
||||
PolyFillType clipFillType);
|
||||
|
||||
bool ReverseSolution() { return m_ReverseOutput; };
|
||||
|
||||
void ReverseSolution(bool value) { m_ReverseOutput = value; };
|
||||
|
||||
bool StrictlySimple() { return m_StrictSimple; };
|
||||
|
||||
void StrictlySimple(bool value) { m_StrictSimple = value; };
|
||||
//set the callback function for z value filling on intersections (otherwise Z is 0)
|
||||
#ifdef use_xyz
|
||||
void ZFillFunction(ZFillCallback zFillFunc);
|
||||
#endif
|
||||
protected:
|
||||
virtual bool ExecuteInternal();
|
||||
|
||||
private:
|
||||
JoinList m_Joins;
|
||||
JoinList m_GhostJoins;
|
||||
IntersectList m_IntersectList;
|
||||
ClipType m_ClipType;
|
||||
typedef std::list <cInt> MaximaList;
|
||||
MaximaList m_Maxima;
|
||||
TEdge *m_SortedEdges;
|
||||
bool m_ExecuteLocked;
|
||||
PolyFillType m_ClipFillType;
|
||||
PolyFillType m_SubjFillType;
|
||||
bool m_ReverseOutput;
|
||||
bool m_UsingPolyTree;
|
||||
bool m_StrictSimple;
|
||||
#ifdef use_xyz
|
||||
ZFillCallback m_ZFill; //custom callback
|
||||
#endif
|
||||
|
||||
void SetWindingCount(TEdge &edge);
|
||||
|
||||
bool IsEvenOddFillType(const TEdge &edge) const;
|
||||
|
||||
bool IsEvenOddAltFillType(const TEdge &edge) const;
|
||||
|
||||
void InsertLocalMinimaIntoAEL(const cInt botY);
|
||||
|
||||
void InsertEdgeIntoAEL(TEdge *edge, TEdge *startEdge);
|
||||
|
||||
void AddEdgeToSEL(TEdge *edge);
|
||||
|
||||
bool PopEdgeFromSEL(TEdge *&edge);
|
||||
|
||||
void CopyAELToSEL();
|
||||
|
||||
void DeleteFromSEL(TEdge *e);
|
||||
|
||||
void SwapPositionsInSEL(TEdge *edge1, TEdge *edge2);
|
||||
|
||||
bool IsContributing(const TEdge &edge) const;
|
||||
|
||||
bool IsTopHorz(const cInt XPos);
|
||||
|
||||
void DoMaxima(TEdge *e);
|
||||
|
||||
void ProcessHorizontals();
|
||||
|
||||
void ProcessHorizontal(TEdge *horzEdge);
|
||||
|
||||
void AddLocalMaxPoly(TEdge *e1, TEdge *e2, const IntPoint &pt);
|
||||
|
||||
OutPt *AddLocalMinPoly(TEdge *e1, TEdge *e2, const IntPoint &pt);
|
||||
|
||||
OutRec *GetOutRec(int idx);
|
||||
|
||||
void AppendPolygon(TEdge *e1, TEdge *e2);
|
||||
|
||||
void IntersectEdges(TEdge *e1, TEdge *e2, IntPoint &pt);
|
||||
|
||||
OutPt *AddOutPt(TEdge *e, const IntPoint &pt);
|
||||
|
||||
OutPt *GetLastOutPt(TEdge *e);
|
||||
|
||||
bool ProcessIntersections(const cInt topY);
|
||||
|
||||
void BuildIntersectList(const cInt topY);
|
||||
|
||||
void ProcessIntersectList();
|
||||
|
||||
void ProcessEdgesAtTopOfScanbeam(const cInt topY);
|
||||
|
||||
void BuildResult(Paths &polys);
|
||||
|
||||
void BuildResult2(PolyTree &polytree);
|
||||
|
||||
void SetHoleState(TEdge *e, OutRec *outrec);
|
||||
|
||||
void DisposeIntersectNodes();
|
||||
|
||||
bool FixupIntersectionOrder();
|
||||
|
||||
void FixupOutPolygon(OutRec &outrec);
|
||||
|
||||
void FixupOutPolyline(OutRec &outrec);
|
||||
|
||||
bool IsHole(TEdge *e);
|
||||
|
||||
bool FindOwnerFromSplitRecs(OutRec &outRec, OutRec *&currOrfl);
|
||||
|
||||
void FixHoleLinkage(OutRec &outrec);
|
||||
|
||||
void AddJoin(OutPt *op1, OutPt *op2, const IntPoint offPt);
|
||||
|
||||
void ClearJoins();
|
||||
|
||||
void ClearGhostJoins();
|
||||
|
||||
void AddGhostJoin(OutPt *op, const IntPoint offPt);
|
||||
|
||||
bool JoinPoints(Join *j, OutRec *outRec1, OutRec *outRec2);
|
||||
|
||||
void JoinCommonEdges();
|
||||
|
||||
void DoSimplePolygons();
|
||||
|
||||
void FixupFirstLefts1(OutRec *OldOutRec, OutRec *NewOutRec);
|
||||
|
||||
void FixupFirstLefts2(OutRec *InnerOutRec, OutRec *OuterOutRec);
|
||||
|
||||
void FixupFirstLefts3(OutRec *OldOutRec, OutRec *NewOutRec);
|
||||
|
||||
#ifdef use_xyz
|
||||
void SetZ(IntPoint& pt, TEdge& e1, TEdge& e2);
|
||||
#endif
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
class ClipperOffset {
|
||||
public:
|
||||
ClipperOffset(double miterLimit = 2.0, double roundPrecision = 0.25);
|
||||
|
||||
~ClipperOffset();
|
||||
|
||||
void AddPath(const Path &path, JoinType joinType, EndType endType);
|
||||
|
||||
void AddPaths(const Paths &paths, JoinType joinType, EndType endType);
|
||||
|
||||
void Execute(Paths &solution, double delta);
|
||||
|
||||
void Execute(PolyTree &solution, double delta);
|
||||
|
||||
void Clear();
|
||||
|
||||
double MiterLimit;
|
||||
double ArcTolerance;
|
||||
private:
|
||||
Paths m_destPolys;
|
||||
Path m_srcPoly;
|
||||
Path m_destPoly;
|
||||
std::vector <DoublePoint> m_normals;
|
||||
double m_delta, m_sinA, m_sin, m_cos;
|
||||
double m_miterLim, m_StepsPerRad;
|
||||
IntPoint m_lowest;
|
||||
PolyNode m_polyNodes;
|
||||
|
||||
void FixOrientations();
|
||||
|
||||
void DoOffset(double delta);
|
||||
|
||||
void OffsetPoint(int j, int &k, JoinType jointype);
|
||||
|
||||
void DoSquare(int j, int k);
|
||||
|
||||
void DoMiter(int j, int k, double r);
|
||||
|
||||
void DoRound(int j, int k);
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
class clipperException : public std::exception {
|
||||
public:
|
||||
clipperException(const char *description) : m_descr(description) {}
|
||||
|
||||
virtual ~clipperException() throw() {}
|
||||
|
||||
virtual const char *what() const throw() { return m_descr.c_str(); }
|
||||
|
||||
private:
|
||||
std::string m_descr;
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
} //ClipperLib namespace
|
||||
|
||||
#endif //clipper_hpp
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,140 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#include "ocr_crnn_process.h"
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <iostream>
|
||||
#include <cstring>
|
||||
#include <fstream>
|
||||
#include <cmath>
|
||||
|
||||
const std::string CHARACTER_TYPE = "ch";
|
||||
const int MAX_DICT_LENGTH = 6624;
|
||||
const std::vector<int> REC_IMAGE_SHAPE = {3, 32, 320};
|
||||
|
||||
static cv::Mat crnn_resize_norm_img(cv::Mat img, float wh_ratio) {
|
||||
int imgC = REC_IMAGE_SHAPE[0];
|
||||
int imgW = REC_IMAGE_SHAPE[2];
|
||||
int imgH = REC_IMAGE_SHAPE[1];
|
||||
|
||||
if (CHARACTER_TYPE == "ch")
|
||||
imgW = int(32 * wh_ratio);
|
||||
|
||||
float ratio = float(img.cols) / float(img.rows);
|
||||
int resize_w = 0;
|
||||
if (ceilf(imgH * ratio) > imgW)
|
||||
resize_w = imgW;
|
||||
else
|
||||
resize_w = int(ceilf(imgH * ratio));
|
||||
cv::Mat resize_img;
|
||||
cv::resize(img, resize_img, cv::Size(resize_w, imgH), 0.f, 0.f, cv::INTER_CUBIC);
|
||||
|
||||
resize_img.convertTo(resize_img, CV_32FC3, 1 / 255.f);
|
||||
|
||||
for (int h = 0; h < resize_img.rows; h++) {
|
||||
for (int w = 0; w < resize_img.cols; w++) {
|
||||
resize_img.at<cv::Vec3f>(h, w)[0] = (resize_img.at<cv::Vec3f>(h, w)[0] - 0.5) * 2;
|
||||
resize_img.at<cv::Vec3f>(h, w)[1] = (resize_img.at<cv::Vec3f>(h, w)[1] - 0.5) * 2;
|
||||
resize_img.at<cv::Vec3f>(h, w)[2] = (resize_img.at<cv::Vec3f>(h, w)[2] - 0.5) * 2;
|
||||
}
|
||||
}
|
||||
|
||||
cv::Mat dist;
|
||||
cv::copyMakeBorder(resize_img, dist, 0, 0, 0, int(imgW - resize_w), cv::BORDER_CONSTANT,
|
||||
{0, 0, 0});
|
||||
|
||||
return dist;
|
||||
|
||||
}
|
||||
|
||||
cv::Mat crnn_resize_img(const cv::Mat &img, float wh_ratio) {
|
||||
int imgC = REC_IMAGE_SHAPE[0];
|
||||
int imgW = REC_IMAGE_SHAPE[2];
|
||||
int imgH = REC_IMAGE_SHAPE[1];
|
||||
|
||||
if (CHARACTER_TYPE == "ch") {
|
||||
imgW = int(32 * wh_ratio);
|
||||
}
|
||||
|
||||
float ratio = float(img.cols) / float(img.rows);
|
||||
int resize_w = 0;
|
||||
if (ceilf(imgH * ratio) > imgW)
|
||||
resize_w = imgW;
|
||||
else
|
||||
resize_w = int(ceilf(imgH * ratio));
|
||||
cv::Mat resize_img;
|
||||
cv::resize(img, resize_img, cv::Size(resize_w, imgH));
|
||||
return resize_img;
|
||||
}
|
||||
|
||||
|
||||
cv::Mat get_rotate_crop_image(const cv::Mat &srcimage, const std::vector<std::vector<int>> &box) {
|
||||
|
||||
std::vector<std::vector<int>> points = box;
|
||||
|
||||
int x_collect[4] = {box[0][0], box[1][0], box[2][0], box[3][0]};
|
||||
int y_collect[4] = {box[0][1], box[1][1], box[2][1], box[3][1]};
|
||||
int left = int(*std::min_element(x_collect, x_collect + 4));
|
||||
int right = int(*std::max_element(x_collect, x_collect + 4));
|
||||
int top = int(*std::min_element(y_collect, y_collect + 4));
|
||||
int bottom = int(*std::max_element(y_collect, y_collect + 4));
|
||||
|
||||
cv::Mat img_crop;
|
||||
srcimage(cv::Rect(left, top, right - left, bottom - top)).copyTo(img_crop);
|
||||
|
||||
for (int i = 0; i < points.size(); i++) {
|
||||
points[i][0] -= left;
|
||||
points[i][1] -= top;
|
||||
}
|
||||
|
||||
int img_crop_width = int(sqrt(pow(points[0][0] - points[1][0], 2) +
|
||||
pow(points[0][1] - points[1][1], 2)));
|
||||
int img_crop_height = int(sqrt(pow(points[0][0] - points[3][0], 2) +
|
||||
pow(points[0][1] - points[3][1], 2)));
|
||||
|
||||
cv::Point2f pts_std[4];
|
||||
pts_std[0] = cv::Point2f(0., 0.);
|
||||
pts_std[1] = cv::Point2f(img_crop_width, 0.);
|
||||
pts_std[2] = cv::Point2f(img_crop_width, img_crop_height);
|
||||
pts_std[3] = cv::Point2f(0.f, img_crop_height);
|
||||
|
||||
cv::Point2f pointsf[4];
|
||||
pointsf[0] = cv::Point2f(points[0][0], points[0][1]);
|
||||
pointsf[1] = cv::Point2f(points[1][0], points[1][1]);
|
||||
pointsf[2] = cv::Point2f(points[2][0], points[2][1]);
|
||||
pointsf[3] = cv::Point2f(points[3][0], points[3][1]);
|
||||
|
||||
cv::Mat M = cv::getPerspectiveTransform(pointsf, pts_std);
|
||||
|
||||
cv::Mat dst_img;
|
||||
cv::warpPerspective(img_crop, dst_img, M, cv::Size(img_crop_width, img_crop_height),
|
||||
cv::BORDER_REPLICATE);
|
||||
|
||||
if (float(dst_img.rows) >= float(dst_img.cols) * 1.5) {
|
||||
/*
|
||||
cv::Mat srcCopy = cv::Mat(dst_img.rows, dst_img.cols, dst_img.depth());
|
||||
cv::transpose(dst_img, srcCopy);
|
||||
cv::flip(srcCopy, srcCopy, 0);
|
||||
return srcCopy;
|
||||
*/
|
||||
cv::transpose(dst_img, dst_img);
|
||||
cv::flip(dst_img, dst_img, 0);
|
||||
return dst_img;
|
||||
} else {
|
||||
return dst_img;
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
|
|
@ -0,0 +1,19 @@
|
|||
//
|
||||
// Created by fujiayi on 2020/7/3.
|
||||
//
|
||||
#pragma once
|
||||
|
||||
#include <vector>
|
||||
#include <opencv2/opencv.hpp>
|
||||
#include "common.h"
|
||||
|
||||
extern const std::vector<int> REC_IMAGE_SHAPE;
|
||||
|
||||
cv::Mat get_rotate_crop_image(const cv::Mat &srcimage, const std::vector<std::vector<int>> &box);
|
||||
|
||||
cv::Mat crnn_resize_img(const cv::Mat &img, float wh_ratio);
|
||||
|
||||
template<class ForwardIterator>
|
||||
inline size_t argmax(ForwardIterator first, ForwardIterator last) {
|
||||
return std::distance(first, std::max_element(first, last));
|
||||
}
|
||||
|
|
@ -0,0 +1,336 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <math.h>
|
||||
#include "opencv2/core.hpp"
|
||||
#include "opencv2/imgcodecs.hpp"
|
||||
#include "opencv2/imgproc.hpp"
|
||||
#include "ocr_clipper.hpp"
|
||||
|
||||
static void getcontourarea(float **box, float unclip_ratio, float &distance) {
|
||||
int pts_num = 4;
|
||||
float area = 0.0f;
|
||||
float dist = 0.0f;
|
||||
for (int i = 0; i < pts_num; i++) {
|
||||
area += box[i][0] * box[(i + 1) % pts_num][1] - box[i][1] * box[(i + 1) % pts_num][0];
|
||||
dist += sqrtf(
|
||||
(box[i][0] - box[(i + 1) % pts_num][0]) * (box[i][0] - box[(i + 1) % pts_num][0]) +
|
||||
(box[i][1] - box[(i + 1) % pts_num][1]) * (box[i][1] - box[(i + 1) % pts_num][1]));
|
||||
}
|
||||
area = fabs(float(area / 2.0));
|
||||
|
||||
distance = area * unclip_ratio / dist;
|
||||
|
||||
}
|
||||
|
||||
static cv::RotatedRect unclip(float **box) {
|
||||
float unclip_ratio = 2.0;
|
||||
float distance = 1.0;
|
||||
|
||||
getcontourarea(box, unclip_ratio, distance);
|
||||
|
||||
ClipperLib::ClipperOffset offset;
|
||||
ClipperLib::Path p;
|
||||
p << ClipperLib::IntPoint(int(box[0][0]), int(box[0][1]))
|
||||
<< ClipperLib::IntPoint(int(box[1][0]), int(box[1][1])) <<
|
||||
ClipperLib::IntPoint(int(box[2][0]), int(box[2][1]))
|
||||
<< ClipperLib::IntPoint(int(box[3][0]), int(box[3][1]));
|
||||
offset.AddPath(p, ClipperLib::jtRound, ClipperLib::etClosedPolygon);
|
||||
|
||||
ClipperLib::Paths soln;
|
||||
offset.Execute(soln, distance);
|
||||
std::vector<cv::Point2f> points;
|
||||
|
||||
for (int j = 0; j < soln.size(); j++) {
|
||||
for (int i = 0; i < soln[soln.size() - 1].size(); i++) {
|
||||
points.emplace_back(soln[j][i].X, soln[j][i].Y);
|
||||
}
|
||||
}
|
||||
cv::RotatedRect res = cv::minAreaRect(points);
|
||||
|
||||
return res;
|
||||
}
|
||||
|
||||
static float **Mat2Vec(cv::Mat mat) {
|
||||
auto **array = new float *[mat.rows];
|
||||
for (int i = 0; i < mat.rows; ++i){
|
||||
array[i] = new float[mat.cols];
|
||||
}
|
||||
for (int i = 0; i < mat.rows; ++i) {
|
||||
for (int j = 0; j < mat.cols; ++j) {
|
||||
array[i][j] = mat.at<float>(i, j);
|
||||
}
|
||||
}
|
||||
|
||||
return array;
|
||||
}
|
||||
|
||||
static void quickSort(float **s, int l, int r) {
|
||||
if (l < r) {
|
||||
int i = l, j = r;
|
||||
float x = s[l][0];
|
||||
float *xp = s[l];
|
||||
while (i < j) {
|
||||
while (i < j && s[j][0] >= x){
|
||||
j--;
|
||||
}
|
||||
if (i < j){
|
||||
std::swap(s[i++], s[j]);
|
||||
}
|
||||
while (i < j && s[i][0] < x){
|
||||
i++;
|
||||
}
|
||||
if (i < j){
|
||||
std::swap(s[j--], s[i]);
|
||||
}
|
||||
}
|
||||
s[i] = xp;
|
||||
quickSort(s, l, i - 1);
|
||||
quickSort(s, i + 1, r);
|
||||
}
|
||||
}
|
||||
|
||||
static void quickSort_vector(std::vector<std::vector<int>> &box, int l, int r, int axis) {
|
||||
if (l < r) {
|
||||
int i = l, j = r;
|
||||
int x = box[l][axis];
|
||||
std::vector<int> xp(box[l]);
|
||||
while (i < j) {
|
||||
while (i < j && box[j][axis] >= x){
|
||||
j--;
|
||||
}
|
||||
if (i < j){
|
||||
std::swap(box[i++], box[j]);
|
||||
}
|
||||
while (i < j && box[i][axis] < x){
|
||||
i++;
|
||||
}
|
||||
if (i < j){
|
||||
std::swap(box[j--], box[i]);
|
||||
}
|
||||
}
|
||||
box[i] = xp;
|
||||
quickSort_vector(box, l, i - 1, axis);
|
||||
quickSort_vector(box, i + 1, r, axis);
|
||||
}
|
||||
}
|
||||
|
||||
static std::vector<std::vector<int>> order_points_clockwise(std::vector<std::vector<int>> pts) {
|
||||
std::vector<std::vector<int>> box = pts;
|
||||
quickSort_vector(box, 0, int(box.size() - 1), 0);
|
||||
std::vector<std::vector<int>> leftmost = {box[0], box[1]};
|
||||
std::vector<std::vector<int>> rightmost = {box[2], box[3]};
|
||||
|
||||
if (leftmost[0][1] > leftmost[1][1]){
|
||||
std::swap(leftmost[0], leftmost[1]);
|
||||
}
|
||||
|
||||
if (rightmost[0][1] > rightmost[1][1]){
|
||||
std::swap(rightmost[0], rightmost[1]);
|
||||
}
|
||||
|
||||
std::vector<std::vector<int>> rect = {leftmost[0], rightmost[0], rightmost[1], leftmost[1]};
|
||||
return rect;
|
||||
}
|
||||
|
||||
static float **get_mini_boxes(cv::RotatedRect box, float &ssid) {
|
||||
ssid = box.size.width >= box.size.height ? box.size.height : box.size.width;
|
||||
|
||||
cv::Mat points;
|
||||
cv::boxPoints(box, points);
|
||||
// sorted box points
|
||||
auto array = Mat2Vec(points);
|
||||
quickSort(array, 0, 3);
|
||||
|
||||
float *idx1 = array[0], *idx2 = array[1], *idx3 = array[2], *idx4 = array[3];
|
||||
if (array[3][1] <= array[2][1]) {
|
||||
idx2 = array[3];
|
||||
idx3 = array[2];
|
||||
} else {
|
||||
idx2 = array[2];
|
||||
idx3 = array[3];
|
||||
}
|
||||
if (array[1][1] <= array[0][1]) {
|
||||
idx1 = array[1];
|
||||
idx4 = array[0];
|
||||
} else {
|
||||
idx1 = array[0];
|
||||
idx4 = array[1];
|
||||
}
|
||||
|
||||
array[0] = idx1;
|
||||
array[1] = idx2;
|
||||
array[2] = idx3;
|
||||
array[3] = idx4;
|
||||
|
||||
return array;
|
||||
}
|
||||
|
||||
template <class T> T clamp(T x, T min, T max) {
|
||||
if (x > max){
|
||||
return max;
|
||||
}
|
||||
if (x < min){
|
||||
return min;
|
||||
}
|
||||
return x;
|
||||
}
|
||||
|
||||
static float clampf(float x, float min, float max) {
|
||||
if (x > max)
|
||||
return max;
|
||||
if (x < min)
|
||||
return min;
|
||||
return x;
|
||||
}
|
||||
|
||||
|
||||
float box_score_fast(float **box_array, cv::Mat pred) {
|
||||
auto array = box_array;
|
||||
int width = pred.cols;
|
||||
int height = pred.rows;
|
||||
|
||||
float box_x[4] = {array[0][0], array[1][0], array[2][0], array[3][0]};
|
||||
float box_y[4] = {array[0][1], array[1][1], array[2][1], array[3][1]};
|
||||
|
||||
int xmin = clamp(int(std::floorf(*(std::min_element(box_x, box_x + 4)))), 0, width - 1);
|
||||
int xmax = clamp(int(std::ceilf(*(std::max_element(box_x, box_x + 4)))), 0, width - 1);
|
||||
int ymin = clamp(int(std::floorf(*(std::min_element(box_y, box_y + 4)))), 0, height - 1);
|
||||
int ymax = clamp(int(std::ceilf(*(std::max_element(box_y, box_y + 4)))), 0, height - 1);
|
||||
|
||||
cv::Mat mask;
|
||||
mask = cv::Mat::zeros(ymax - ymin + 1, xmax - xmin + 1, CV_8UC1);
|
||||
|
||||
cv::Point root_point[4];
|
||||
root_point[0] = cv::Point(int(array[0][0]) - xmin, int(array[0][1]) - ymin);
|
||||
root_point[1] = cv::Point(int(array[1][0]) - xmin, int(array[1][1]) - ymin);
|
||||
root_point[2] = cv::Point(int(array[2][0]) - xmin, int(array[2][1]) - ymin);
|
||||
root_point[3] = cv::Point(int(array[3][0]) - xmin, int(array[3][1]) - ymin);
|
||||
const cv::Point *ppt[1] = {root_point};
|
||||
int npt[] = {4};
|
||||
cv::fillPoly(mask, ppt, npt, 1, cv::Scalar(1));
|
||||
|
||||
cv::Mat croppedImg;
|
||||
pred(cv::Rect(xmin, ymin, xmax - xmin + 1, ymax - ymin + 1)).copyTo(croppedImg);
|
||||
|
||||
auto score = cv::mean(croppedImg, mask)[0];
|
||||
return score;
|
||||
}
|
||||
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
boxes_from_bitmap(const cv::Mat& pred, const cv::Mat& bitmap) {
|
||||
const int min_size = 3;
|
||||
const int max_candidates = 1000;
|
||||
const float box_thresh = 0.5;
|
||||
|
||||
int width = bitmap.cols;
|
||||
int height = bitmap.rows;
|
||||
|
||||
std::vector<std::vector<cv::Point>> contours;
|
||||
std::vector<cv::Vec4i> hierarchy;
|
||||
|
||||
cv::findContours(bitmap, contours, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);
|
||||
|
||||
int num_contours = contours.size() >= max_candidates ? max_candidates : contours.size();
|
||||
|
||||
std::vector<std::vector<std::vector<int>>> boxes;
|
||||
|
||||
for (int _i = 0; _i < num_contours; _i++) {
|
||||
float ssid;
|
||||
cv::RotatedRect box = cv::minAreaRect(contours[_i]);
|
||||
auto array = get_mini_boxes(box, ssid);
|
||||
|
||||
auto box_for_unclip = array;
|
||||
//end get_mini_box
|
||||
|
||||
if (ssid < min_size) {
|
||||
continue;
|
||||
}
|
||||
|
||||
float score;
|
||||
score = box_score_fast(array, pred);
|
||||
//end box_score_fast
|
||||
if (score < box_thresh){
|
||||
continue;
|
||||
}
|
||||
|
||||
|
||||
// start for unclip
|
||||
cv::RotatedRect points = unclip(box_for_unclip);
|
||||
// end for unclip
|
||||
|
||||
cv::RotatedRect clipbox = points;
|
||||
auto cliparray = get_mini_boxes(clipbox, ssid);
|
||||
|
||||
if (ssid < min_size + 2) continue;
|
||||
|
||||
int dest_width = pred.cols;
|
||||
int dest_height = pred.rows;
|
||||
std::vector<std::vector<int>> intcliparray;
|
||||
|
||||
for (int num_pt = 0; num_pt < 4; num_pt++) {
|
||||
std::vector<int> a{
|
||||
int(clampf(roundf(cliparray[num_pt][0] / float(width) * float(dest_width)), 0,
|
||||
float(dest_width))),
|
||||
int(clampf(roundf(cliparray[num_pt][1] / float(height) * float(dest_height)), 0,
|
||||
float(dest_height)))};
|
||||
intcliparray.emplace_back(std::move(a));
|
||||
}
|
||||
boxes.emplace_back(std::move(intcliparray));
|
||||
|
||||
}//end for
|
||||
return boxes;
|
||||
}
|
||||
|
||||
int _max(int a, int b) {
|
||||
return a >= b ? a : b;
|
||||
}
|
||||
|
||||
int _min(int a, int b) {
|
||||
return a >= b ? b : a;
|
||||
}
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
filter_tag_det_res(const std::vector<std::vector<std::vector<int>>>& o_boxes,
|
||||
float ratio_h, float ratio_w,const cv::Mat& srcimg) {
|
||||
int oriimg_h = srcimg.rows;
|
||||
int oriimg_w = srcimg.cols;
|
||||
std::vector<std::vector<std::vector<int>>> boxes{o_boxes};
|
||||
std::vector<std::vector<std::vector<int>>> root_points;
|
||||
for (int n = 0; n < boxes.size(); n++) {
|
||||
boxes[n] = order_points_clockwise(boxes[n]);
|
||||
for (int m = 0; m < boxes[0].size(); m++) {
|
||||
boxes[n][m][0] /= ratio_w;
|
||||
boxes[n][m][1] /= ratio_h;
|
||||
|
||||
boxes[n][m][0] = int(_min(_max(boxes[n][m][0], 0), oriimg_w - 1));
|
||||
boxes[n][m][1] = int(_min(_max(boxes[n][m][1], 0), oriimg_h - 1));
|
||||
}
|
||||
}
|
||||
|
||||
for (int n = 0; n < boxes.size(); n++) {
|
||||
int rect_width, rect_height;
|
||||
rect_width = int(sqrt(
|
||||
pow(boxes[n][0][0] - boxes[n][1][0], 2) + pow(boxes[n][0][1] - boxes[n][1][1], 2)));
|
||||
rect_height = int(sqrt(
|
||||
pow(boxes[n][0][0] - boxes[n][3][0], 2) + pow(boxes[n][0][1] - boxes[n][3][1], 2)));
|
||||
if (rect_width <= 10 || rect_height <= 10)
|
||||
continue;
|
||||
root_points.push_back(boxes[n]);
|
||||
}
|
||||
return root_points;
|
||||
}
|
||||
|
|
@ -0,0 +1,17 @@
|
|||
//
|
||||
// Created by fujiayi on 2020/7/2.
|
||||
//
|
||||
#pragma once
|
||||
#include <vector>
|
||||
#include <opencv2/opencv.hpp>
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
boxes_from_bitmap(const cv::Mat &pred, const cv::Mat &bitmap);
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
filter_tag_det_res(
|
||||
const std::vector<std::vector<std::vector<int>>> &o_boxes,
|
||||
float ratio_h,
|
||||
float ratio_w,
|
||||
const cv::Mat &srcimg
|
||||
);
|
||||
|
|
@ -0,0 +1,186 @@
|
|||
//
|
||||
// Created by fujiayi on 2020/7/1.
|
||||
//
|
||||
|
||||
#include "ocr_ppredictor.h"
|
||||
#include "preprocess.h"
|
||||
#include "common.h"
|
||||
#include "ocr_db_post_process.h"
|
||||
#include "ocr_crnn_process.h"
|
||||
|
||||
namespace ppredictor {
|
||||
|
||||
OCR_PPredictor::OCR_PPredictor(const OCR_Config &config) : _config(config) {
|
||||
|
||||
}
|
||||
|
||||
int
|
||||
OCR_PPredictor::init(const std::string &det_model_content, const std::string &rec_model_content) {
|
||||
_det_predictor = std::unique_ptr<PPredictor>(
|
||||
new PPredictor{_config.thread_num, NET_OCR, _config.mode});
|
||||
_det_predictor->init_nb(det_model_content);
|
||||
|
||||
_rec_predictor = std::unique_ptr<PPredictor>(
|
||||
new PPredictor{_config.thread_num, NET_OCR_INTERNAL, _config.mode});
|
||||
_rec_predictor->init_nb(rec_model_content);
|
||||
return RETURN_OK;
|
||||
}
|
||||
|
||||
int OCR_PPredictor::init_from_file(const std::string &det_model_path, const std::string &rec_model_path){
|
||||
_det_predictor = std::unique_ptr<PPredictor>(
|
||||
new PPredictor{_config.thread_num, NET_OCR, _config.mode});
|
||||
_det_predictor->init_from_file(det_model_path);
|
||||
|
||||
_rec_predictor = std::unique_ptr<PPredictor>(
|
||||
new PPredictor{_config.thread_num, NET_OCR_INTERNAL, _config.mode});
|
||||
_rec_predictor->init_from_file(rec_model_path);
|
||||
return RETURN_OK;
|
||||
}
|
||||
/**
|
||||
* for debug use, show result of First Step
|
||||
* @param filter_boxes
|
||||
* @param boxes
|
||||
* @param srcimg
|
||||
*/
|
||||
static void visual_img(const std::vector<std::vector<std::vector<int>>> &filter_boxes,
|
||||
const std::vector<std::vector<std::vector<int>>> &boxes,
|
||||
const cv::Mat &srcimg) {
|
||||
// visualization
|
||||
cv::Point rook_points[filter_boxes.size()][4];
|
||||
for (int n = 0; n < filter_boxes.size(); n++) {
|
||||
for (int m = 0; m < filter_boxes[0].size(); m++) {
|
||||
rook_points[n][m] = cv::Point(int(filter_boxes[n][m][0]), int(filter_boxes[n][m][1]));
|
||||
}
|
||||
}
|
||||
|
||||
cv::Mat img_vis;
|
||||
srcimg.copyTo(img_vis);
|
||||
for (int n = 0; n < boxes.size(); n++) {
|
||||
const cv::Point *ppt[1] = {rook_points[n]};
|
||||
int npt[] = {4};
|
||||
cv::polylines(img_vis, ppt, npt, 1, 1, CV_RGB(0, 255, 0), 2, 8, 0);
|
||||
}
|
||||
// 调试用,自行替换需要修改的路径
|
||||
cv::imwrite("/sdcard/1/vis.png", img_vis);
|
||||
}
|
||||
|
||||
std::vector<OCRPredictResult>
|
||||
OCR_PPredictor::infer_ocr(const std::vector<int64_t> &dims, const float *input_data, int input_len,
|
||||
int net_flag, cv::Mat &origin) {
|
||||
|
||||
PredictorInput input = _det_predictor->get_first_input();
|
||||
input.set_dims(dims);
|
||||
input.set_data(input_data, input_len);
|
||||
std::vector<PredictorOutput> results = _det_predictor->infer();
|
||||
PredictorOutput &res = results.at(0);
|
||||
std::vector<std::vector<std::vector<int>>> filtered_box
|
||||
= calc_filtered_boxes(res.get_float_data(), res.get_size(), (int) dims[2], (int) dims[3],
|
||||
origin);
|
||||
LOGI("Filter_box size %ld", filtered_box.size());
|
||||
return infer_rec(filtered_box, origin);
|
||||
}
|
||||
|
||||
std::vector<OCRPredictResult>
|
||||
OCR_PPredictor::infer_rec(const std::vector<std::vector<std::vector<int>>> &boxes,
|
||||
const cv::Mat &origin_img) {
|
||||
std::vector<float> mean = {0.5f, 0.5f, 0.5f};
|
||||
std::vector<float> scale = {1 / 0.5f, 1 / 0.5f, 1 / 0.5f};
|
||||
std::vector<int64_t> dims = {1, 3, 0, 0};
|
||||
std::vector<OCRPredictResult> ocr_results;
|
||||
|
||||
PredictorInput input = _rec_predictor->get_first_input();
|
||||
for (auto bp = boxes.crbegin(); bp != boxes.crend(); ++bp) {
|
||||
const std::vector<std::vector<int>> &box = *bp;
|
||||
cv::Mat crop_img = get_rotate_crop_image(origin_img, box);
|
||||
float wh_ratio = float(crop_img.cols) / float(crop_img.rows);
|
||||
cv::Mat input_image = crnn_resize_img(crop_img, wh_ratio);
|
||||
input_image.convertTo(input_image, CV_32FC3, 1 / 255.0f);
|
||||
const float *dimg = reinterpret_cast<const float *>(input_image.data);
|
||||
int input_size = input_image.rows * input_image.cols;
|
||||
|
||||
dims[2] = input_image.rows;
|
||||
dims[3] = input_image.cols;
|
||||
input.set_dims(dims);
|
||||
|
||||
neon_mean_scale(dimg, input.get_mutable_float_data(), input_size, mean, scale);
|
||||
|
||||
std::vector<PredictorOutput> results = _rec_predictor->infer();
|
||||
|
||||
OCRPredictResult res;
|
||||
res.word_index = postprocess_rec_word_index(results.at(0));
|
||||
if (res.word_index.empty()) {
|
||||
continue;
|
||||
}
|
||||
res.score = postprocess_rec_score(results.at(1));
|
||||
res.points = box;
|
||||
ocr_results.emplace_back(std::move(res));
|
||||
}
|
||||
LOGI("ocr_results finished %lu", ocr_results.size());
|
||||
return ocr_results;
|
||||
}
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
OCR_PPredictor::calc_filtered_boxes(const float *pred, int pred_size, int output_height,
|
||||
int output_width, const cv::Mat &origin) {
|
||||
const double threshold = 0.3;
|
||||
const double maxvalue = 1;
|
||||
|
||||
cv::Mat pred_map = cv::Mat::zeros(output_height, output_width, CV_32F);
|
||||
memcpy(pred_map.data, pred, pred_size * sizeof(float));
|
||||
cv::Mat cbuf_map;
|
||||
pred_map.convertTo(cbuf_map, CV_8UC1);
|
||||
|
||||
cv::Mat bit_map;
|
||||
cv::threshold(cbuf_map, bit_map, threshold, maxvalue, cv::THRESH_BINARY);
|
||||
|
||||
std::vector<std::vector<std::vector<int>>> boxes = boxes_from_bitmap(pred_map, bit_map);
|
||||
float ratio_h = output_height * 1.0f / origin.rows;
|
||||
float ratio_w = output_width * 1.0f / origin.cols;
|
||||
std::vector<std::vector<std::vector<int>>> filter_boxes = filter_tag_det_res(boxes, ratio_h,
|
||||
ratio_w, origin);
|
||||
return filter_boxes;
|
||||
}
|
||||
|
||||
std::vector<int> OCR_PPredictor::postprocess_rec_word_index(const PredictorOutput &res) {
|
||||
const int *rec_idx = res.get_int_data();
|
||||
const std::vector<std::vector<uint64_t>> rec_idx_lod = res.get_lod();
|
||||
|
||||
std::vector<int> pred_idx;
|
||||
for (int n = int(rec_idx_lod[0][0]); n < int(rec_idx_lod[0][1] * 2); n += 2) {
|
||||
pred_idx.emplace_back(rec_idx[n]);
|
||||
}
|
||||
return pred_idx;
|
||||
}
|
||||
|
||||
float OCR_PPredictor::postprocess_rec_score(const PredictorOutput &res) {
|
||||
const float *predict_batch = res.get_float_data();
|
||||
const std::vector<int64_t> predict_shape = res.get_shape();
|
||||
const std::vector<std::vector<uint64_t>> predict_lod = res.get_lod();
|
||||
int blank = predict_shape[1];
|
||||
float score = 0.f;
|
||||
int count = 0;
|
||||
for (int n = predict_lod[0][0]; n < predict_lod[0][1] - 1; n++) {
|
||||
int argmax_idx = argmax(predict_batch + n * predict_shape[1],
|
||||
predict_batch + (n + 1) * predict_shape[1]);
|
||||
float max_value = predict_batch[n * predict_shape[1] + argmax_idx];
|
||||
if (blank - 1 - argmax_idx > 1e-5) {
|
||||
score += max_value;
|
||||
count += 1;
|
||||
}
|
||||
|
||||
}
|
||||
if (count == 0) {
|
||||
LOGE("calc score count 0");
|
||||
} else {
|
||||
score /= count;
|
||||
}
|
||||
LOGI("calc score: %f", score);
|
||||
return score;
|
||||
|
||||
}
|
||||
|
||||
|
||||
NET_TYPE OCR_PPredictor::get_net_flag() const {
|
||||
return NET_OCR;
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,112 @@
|
|||
//
|
||||
// Created by fujiayi on 2020/7/1.
|
||||
//
|
||||
|
||||
#pragma once
|
||||
|
||||
#include <string>
|
||||
#include <opencv2/opencv.hpp>
|
||||
#include <paddle_api.h>
|
||||
#include "ppredictor.h"
|
||||
|
||||
namespace ppredictor {
|
||||
|
||||
/**
|
||||
* Config
|
||||
*/
|
||||
struct OCR_Config {
|
||||
int thread_num = 4; // Thread num
|
||||
paddle::lite_api::PowerMode mode = paddle::lite_api::LITE_POWER_HIGH; // PaddleLite Mode
|
||||
};
|
||||
|
||||
/**
|
||||
* PolyGone Result
|
||||
*/
|
||||
struct OCRPredictResult {
|
||||
std::vector<int> word_index;
|
||||
std::vector<std::vector<int>> points;
|
||||
float score;
|
||||
};
|
||||
|
||||
/**
|
||||
* OCR there are 2 models
|
||||
* 1. First model(det),select polygones to show where are the texts
|
||||
* 2. crop from the origin images, use these polygones to infer
|
||||
*/
|
||||
class OCR_PPredictor : public PPredictor_Interface {
|
||||
public:
|
||||
OCR_PPredictor(const OCR_Config &config);
|
||||
|
||||
virtual ~OCR_PPredictor() {
|
||||
|
||||
}
|
||||
|
||||
/**
|
||||
* 初始化二个模型的Predictor
|
||||
* @param det_model_content
|
||||
* @param rec_model_content
|
||||
* @return
|
||||
*/
|
||||
int init(const std::string &det_model_content, const std::string &rec_model_content);
|
||||
int init_from_file(const std::string &det_model_path, const std::string &rec_model_path);
|
||||
/**
|
||||
* Return OCR result
|
||||
* @param dims
|
||||
* @param input_data
|
||||
* @param input_len
|
||||
* @param net_flag
|
||||
* @param origin
|
||||
* @return
|
||||
*/
|
||||
virtual std::vector<OCRPredictResult>
|
||||
infer_ocr(const std::vector<int64_t> &dims, const float *input_data, int input_len,
|
||||
int net_flag, cv::Mat &origin);
|
||||
|
||||
|
||||
virtual NET_TYPE get_net_flag() const;
|
||||
|
||||
|
||||
private:
|
||||
|
||||
/**
|
||||
* calcul Polygone from the result image of first model
|
||||
* @param pred
|
||||
* @param output_height
|
||||
* @param output_width
|
||||
* @param origin
|
||||
* @return
|
||||
*/
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
calc_filtered_boxes(const float *pred, int pred_size, int output_height, int output_width,
|
||||
const cv::Mat &origin);
|
||||
|
||||
/**
|
||||
* infer for second model
|
||||
*
|
||||
* @param boxes
|
||||
* @param origin
|
||||
* @return
|
||||
*/
|
||||
std::vector<OCRPredictResult>
|
||||
infer_rec(const std::vector<std::vector<std::vector<int>>> &boxes, const cv::Mat &origin);
|
||||
|
||||
/**
|
||||
* Postprocess or sencod model to extract text
|
||||
* @param res
|
||||
* @return
|
||||
*/
|
||||
std::vector<int> postprocess_rec_word_index(const PredictorOutput &res);
|
||||
|
||||
/**
|
||||
* calculate confidence of second model text result
|
||||
* @param res
|
||||
* @return
|
||||
*/
|
||||
float postprocess_rec_score(const PredictorOutput &res);
|
||||
|
||||
std::unique_ptr<PPredictor> _det_predictor;
|
||||
std::unique_ptr<PPredictor> _rec_predictor;
|
||||
OCR_Config _config;
|
||||
|
||||
};
|
||||
}
|
||||
|
|
@ -0,0 +1,70 @@
|
|||
#include "ppredictor.h"
|
||||
#include "common.h"
|
||||
|
||||
namespace ppredictor {
|
||||
PPredictor::PPredictor(int thread_num, int net_flag, paddle::lite_api::PowerMode mode) :
|
||||
_thread_num(thread_num), _net_flag(net_flag), _mode(mode) {
|
||||
}
|
||||
|
||||
int PPredictor::init_nb(const std::string &model_content) {
|
||||
paddle::lite_api::MobileConfig config;
|
||||
config.set_model_from_buffer(model_content);
|
||||
return _init(config);
|
||||
}
|
||||
|
||||
int PPredictor::init_from_file(const std::string &model_content){
|
||||
paddle::lite_api::MobileConfig config;
|
||||
config.set_model_from_file(model_content);
|
||||
return _init(config);
|
||||
}
|
||||
|
||||
template<typename ConfigT>
|
||||
int PPredictor::_init(ConfigT &config) {
|
||||
config.set_threads(_thread_num);
|
||||
config.set_power_mode(_mode);
|
||||
_predictor = paddle::lite_api::CreatePaddlePredictor(config);
|
||||
LOGI("paddle instance created");
|
||||
return RETURN_OK;
|
||||
}
|
||||
|
||||
PredictorInput PPredictor::get_input(int index) {
|
||||
PredictorInput input{_predictor->GetInput(index), index, _net_flag};
|
||||
_is_input_get = true;
|
||||
return input;
|
||||
}
|
||||
|
||||
std::vector<PredictorInput> PPredictor::get_inputs(int num) {
|
||||
std::vector<PredictorInput> results;
|
||||
for (int i = 0; i < num; i++) {
|
||||
results.emplace_back(get_input(i));
|
||||
}
|
||||
return results;
|
||||
}
|
||||
|
||||
PredictorInput PPredictor::get_first_input() {
|
||||
return get_input(0);
|
||||
}
|
||||
|
||||
std::vector<PredictorOutput> PPredictor::infer() {
|
||||
LOGI("infer Run start %d", _net_flag);
|
||||
std::vector<PredictorOutput> results;
|
||||
if (!_is_input_get) {
|
||||
return results;
|
||||
}
|
||||
_predictor->Run();
|
||||
LOGI("infer Run end");
|
||||
|
||||
for (int i = 0; i < _predictor->GetOutputNames().size(); i++) {
|
||||
std::unique_ptr<const paddle::lite_api::Tensor> output_tensor = _predictor->GetOutput(i);
|
||||
LOGI("output tensor[%d] size %ld", i, product(output_tensor->shape()));
|
||||
PredictorOutput result{std::move(output_tensor), i, _net_flag};
|
||||
results.emplace_back(std::move(result));
|
||||
}
|
||||
return results;
|
||||
}
|
||||
|
||||
NET_TYPE PPredictor::get_net_flag() const {
|
||||
return (NET_TYPE) _net_flag;
|
||||
}
|
||||
|
||||
}
|
||||
|
|
@ -0,0 +1,74 @@
|
|||
#pragma once
|
||||
|
||||
#include "paddle_api.h"
|
||||
#include "predictor_input.h"
|
||||
#include "predictor_output.h"
|
||||
|
||||
namespace ppredictor {
|
||||
|
||||
/**
|
||||
* PaddleLite Preditor Common Interface
|
||||
*/
|
||||
class PPredictor_Interface {
|
||||
public:
|
||||
virtual ~PPredictor_Interface() {
|
||||
|
||||
}
|
||||
|
||||
|
||||
virtual NET_TYPE get_net_flag() const = 0;
|
||||
|
||||
};
|
||||
|
||||
/**
|
||||
* Common Predictor
|
||||
*/
|
||||
class PPredictor : public PPredictor_Interface {
|
||||
public:
|
||||
PPredictor(int thread_num, int net_flag = 0,
|
||||
paddle::lite_api::PowerMode mode = paddle::lite_api::LITE_POWER_HIGH);
|
||||
|
||||
virtual ~PPredictor() {
|
||||
|
||||
}
|
||||
|
||||
/**
|
||||
* init paddlitelite opt model,nb format ,or use ini_paddle
|
||||
* @param model_content
|
||||
* @return 0
|
||||
*/
|
||||
virtual int init_nb(const std::string &model_content);
|
||||
|
||||
virtual int init_from_file(const std::string &model_content);
|
||||
|
||||
std::vector<PredictorOutput> infer();
|
||||
|
||||
std::shared_ptr<paddle::lite_api::PaddlePredictor> get_predictor() {
|
||||
return _predictor;
|
||||
}
|
||||
|
||||
virtual std::vector<PredictorInput> get_inputs(int num);
|
||||
|
||||
virtual PredictorInput get_input(int index);
|
||||
|
||||
virtual PredictorInput get_first_input();
|
||||
|
||||
virtual NET_TYPE get_net_flag() const;
|
||||
|
||||
protected:
|
||||
template<typename ConfigT>
|
||||
int _init(ConfigT &config);
|
||||
|
||||
private:
|
||||
int _thread_num;
|
||||
paddle::lite_api::PowerMode _mode;
|
||||
std::shared_ptr<paddle::lite_api::PaddlePredictor> _predictor;
|
||||
bool _is_input_get = false;
|
||||
int _net_flag;
|
||||
|
||||
};
|
||||
|
||||
|
||||
}
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,29 @@
|
|||
#include "predictor_input.h"
|
||||
|
||||
namespace ppredictor {
|
||||
|
||||
|
||||
void PredictorInput::set_dims(std::vector<int64_t> dims) {
|
||||
// yolov3
|
||||
if (_net_flag == 101 && _index == 1) {
|
||||
_tensor->Resize({1, 2});
|
||||
_tensor->mutable_data<int>()[0] = (int) dims.at(2);
|
||||
_tensor->mutable_data<int>()[1] = (int) dims.at(3);
|
||||
} else {
|
||||
_tensor->Resize(dims);
|
||||
}
|
||||
_is_dims_set = true;
|
||||
}
|
||||
|
||||
float *PredictorInput::get_mutable_float_data() {
|
||||
if (!_is_dims_set) {
|
||||
LOGE("PredictorInput::set_dims is not called");
|
||||
}
|
||||
return _tensor->mutable_data<float>();
|
||||
}
|
||||
|
||||
void PredictorInput::set_data(const float *input_data, int input_float_len) {
|
||||
float *input_raw_data = get_mutable_float_data();
|
||||
memcpy(input_raw_data, input_data, input_float_len * sizeof(float));
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,28 @@
|
|||
#pragma once
|
||||
|
||||
#include <paddle_api.h>
|
||||
#include <vector>
|
||||
#include "common.h"
|
||||
|
||||
namespace ppredictor {
|
||||
class PredictorInput {
|
||||
public:
|
||||
PredictorInput(std::unique_ptr<paddle::lite_api::Tensor> &&tensor, int index, int net_flag) :
|
||||
_tensor(std::move(tensor)), _index(index),_net_flag(net_flag) {
|
||||
|
||||
}
|
||||
|
||||
|
||||
void set_dims(std::vector<int64_t> dims);
|
||||
|
||||
float *get_mutable_float_data();
|
||||
|
||||
void set_data(const float *input_data, int input_float_len);
|
||||
|
||||
private:
|
||||
std::unique_ptr<paddle::lite_api::Tensor> _tensor;
|
||||
bool _is_dims_set = false;
|
||||
int _index;
|
||||
int _net_flag;
|
||||
};
|
||||
}
|
||||
|
|
@ -0,0 +1,27 @@
|
|||
#include "predictor_output.h"
|
||||
namespace ppredictor {
|
||||
const float* PredictorOutput::get_float_data() const{
|
||||
return _tensor->data<float>();
|
||||
}
|
||||
|
||||
const int* PredictorOutput::get_int_data() const{
|
||||
return _tensor->data<int>();
|
||||
}
|
||||
|
||||
const std::vector<std::vector<uint64_t>> PredictorOutput::get_lod() const{
|
||||
return _tensor->lod();
|
||||
}
|
||||
|
||||
int64_t PredictorOutput::get_size() const{
|
||||
if (_net_flag == NET_OCR) {
|
||||
return _tensor->shape().at(2) * _tensor->shape().at(3);
|
||||
} else {
|
||||
return product(_tensor->shape());
|
||||
}
|
||||
}
|
||||
|
||||
const std::vector<int64_t> PredictorOutput::get_shape() const{
|
||||
return _tensor->shape();
|
||||
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,35 @@
|
|||
#pragma once
|
||||
|
||||
#include <paddle_api.h>
|
||||
#include <vector>
|
||||
#include "common.h"
|
||||
|
||||
namespace ppredictor {
|
||||
class PredictorOutput {
|
||||
public:
|
||||
PredictorOutput(){
|
||||
|
||||
}
|
||||
PredictorOutput(std::unique_ptr<const paddle::lite_api::Tensor> &&tensor, int index, int net_flag) :
|
||||
_tensor(std::move(tensor)), _index(index), _net_flag(net_flag) {
|
||||
|
||||
}
|
||||
|
||||
const float* get_float_data() const;
|
||||
const int* get_int_data() const;
|
||||
int64_t get_size() const;
|
||||
const std::vector<std::vector<uint64_t>> get_lod() const;
|
||||
const std::vector<int64_t> get_shape() const;
|
||||
|
||||
std::vector<float> data; // return float, or use data_int
|
||||
std::vector<int> data_int; // several layers return int ,or use data
|
||||
std::vector<int64_t> shape; // PaddleLite output shape
|
||||
std::vector<std::vector<uint64_t>> lod; // PaddleLite output lod
|
||||
|
||||
private:
|
||||
std::unique_ptr<const paddle::lite_api::Tensor> _tensor;
|
||||
int _index;
|
||||
int _net_flag;
|
||||
};
|
||||
}
|
||||
|
||||
|
|
@ -0,0 +1,84 @@
|
|||
#include "preprocess.h"
|
||||
#include <android/bitmap.h>
|
||||
|
||||
cv::Mat bitmap_to_cv_mat(JNIEnv *env, jobject bitmap) {
|
||||
AndroidBitmapInfo info;
|
||||
int result = AndroidBitmap_getInfo(env, bitmap, &info);
|
||||
if (result != ANDROID_BITMAP_RESULT_SUCCESS) {
|
||||
LOGE("AndroidBitmap_getInfo failed, result: %d", result);
|
||||
return cv::Mat{};
|
||||
}
|
||||
if (info.format != ANDROID_BITMAP_FORMAT_RGBA_8888) {
|
||||
LOGE("Bitmap format is not RGBA_8888 !");
|
||||
return cv::Mat{};
|
||||
}
|
||||
unsigned char *srcData = NULL;
|
||||
AndroidBitmap_lockPixels(env, bitmap, (void **) &srcData);
|
||||
cv::Mat mat = cv::Mat::zeros(info.height, info.width, CV_8UC4);
|
||||
memcpy(mat.data, srcData, info.height * info.width * 4);
|
||||
AndroidBitmap_unlockPixels(env, bitmap);
|
||||
cv::cvtColor(mat, mat, cv::COLOR_RGBA2BGR);
|
||||
/**
|
||||
if (!cv::imwrite("/sdcard/1/copy.jpg", mat)){
|
||||
LOGE("Write image failed " );
|
||||
}
|
||||
*/
|
||||
|
||||
return mat;
|
||||
}
|
||||
|
||||
cv::Mat resize_img(const cv::Mat& img, int height, int width){
|
||||
if (img.rows == height && img.cols == width){
|
||||
return img;
|
||||
}
|
||||
cv::Mat new_img;
|
||||
cv::resize(img, new_img, cv::Size(height, width));
|
||||
return new_img;
|
||||
}
|
||||
|
||||
// fill tensor with mean and scale and trans layout: nhwc -> nchw, neon speed up
|
||||
void neon_mean_scale(const float* din,
|
||||
float* dout,
|
||||
int size,
|
||||
const std::vector<float>& mean,
|
||||
const std::vector<float>& scale) {
|
||||
if (mean.size() != 3 || scale.size() != 3) {
|
||||
LOGE("[ERROR] mean or scale size must equal to 3");
|
||||
return;
|
||||
}
|
||||
|
||||
float32x4_t vmean0 = vdupq_n_f32(mean[0]);
|
||||
float32x4_t vmean1 = vdupq_n_f32(mean[1]);
|
||||
float32x4_t vmean2 = vdupq_n_f32(mean[2]);
|
||||
float32x4_t vscale0 = vdupq_n_f32(scale[0]);
|
||||
float32x4_t vscale1 = vdupq_n_f32(scale[1]);
|
||||
float32x4_t vscale2 = vdupq_n_f32(scale[2]);
|
||||
|
||||
float* dout_c0 = dout;
|
||||
float* dout_c1 = dout + size;
|
||||
float* dout_c2 = dout + size * 2;
|
||||
|
||||
int i = 0;
|
||||
for (; i < size - 3; i += 4) {
|
||||
float32x4x3_t vin3 = vld3q_f32(din);
|
||||
float32x4_t vsub0 = vsubq_f32(vin3.val[0], vmean0);
|
||||
float32x4_t vsub1 = vsubq_f32(vin3.val[1], vmean1);
|
||||
float32x4_t vsub2 = vsubq_f32(vin3.val[2], vmean2);
|
||||
float32x4_t vs0 = vmulq_f32(vsub0, vscale0);
|
||||
float32x4_t vs1 = vmulq_f32(vsub1, vscale1);
|
||||
float32x4_t vs2 = vmulq_f32(vsub2, vscale2);
|
||||
vst1q_f32(dout_c0, vs0);
|
||||
vst1q_f32(dout_c1, vs1);
|
||||
vst1q_f32(dout_c2, vs2);
|
||||
|
||||
din += 12;
|
||||
dout_c0 += 4;
|
||||
dout_c1 += 4;
|
||||
dout_c2 += 4;
|
||||
}
|
||||
for (; i < size; i++) {
|
||||
*(dout_c0++) = (*(din++) - mean[0]) * scale[0];
|
||||
*(dout_c1++) = (*(din++) - mean[1]) * scale[1];
|
||||
*(dout_c2++) = (*(din++) - mean[2]) * scale[2];
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,14 @@
|
|||
#pragma once
|
||||
|
||||
#include <jni.h>
|
||||
#include <opencv2/opencv.hpp>
|
||||
#include "common.h"
|
||||
cv::Mat bitmap_to_cv_mat(JNIEnv *env, jobject bitmap);
|
||||
|
||||
cv::Mat resize_img(const cv::Mat& img, int height, int width);
|
||||
|
||||
void neon_mean_scale(const float* din,
|
||||
float* dout,
|
||||
int size,
|
||||
const std::vector<float>& mean,
|
||||
const std::vector<float>& scale);
|
||||
|
|
@ -0,0 +1,128 @@
|
|||
/*
|
||||
* Copyright (C) 2014 The Android Open Source Project
|
||||
*
|
||||
* Licensed under the Apache License, Version 2.0 (the "License");
|
||||
* you may not use this file except in compliance with the License.
|
||||
* You may obtain a copy of the License at
|
||||
*
|
||||
* http://www.apache.org/licenses/LICENSE-2.0
|
||||
*
|
||||
* Unless required by applicable law or agreed to in writing, software
|
||||
* distributed under the License is distributed on an "AS IS" BASIS,
|
||||
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
* See the License for the specific language governing permissions and
|
||||
* limitations under the License.
|
||||
*/
|
||||
|
||||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.content.res.Configuration;
|
||||
import android.os.Bundle;
|
||||
import android.preference.PreferenceActivity;
|
||||
import android.view.MenuInflater;
|
||||
import android.view.View;
|
||||
import android.view.ViewGroup;
|
||||
|
||||
import androidx.annotation.LayoutRes;
|
||||
import androidx.annotation.Nullable;
|
||||
import androidx.appcompat.app.ActionBar;
|
||||
import androidx.appcompat.app.AppCompatDelegate;
|
||||
import androidx.appcompat.widget.Toolbar;
|
||||
|
||||
/**
|
||||
* A {@link PreferenceActivity} which implements and proxies the necessary calls
|
||||
* to be used with AppCompat.
|
||||
* <p>
|
||||
* This technique can be used with an {@link android.app.Activity} class, not just
|
||||
* {@link PreferenceActivity}.
|
||||
*/
|
||||
public abstract class AppCompatPreferenceActivity extends PreferenceActivity {
|
||||
private AppCompatDelegate mDelegate;
|
||||
|
||||
@Override
|
||||
protected void onCreate(Bundle savedInstanceState) {
|
||||
getDelegate().installViewFactory();
|
||||
getDelegate().onCreate(savedInstanceState);
|
||||
super.onCreate(savedInstanceState);
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onPostCreate(Bundle savedInstanceState) {
|
||||
super.onPostCreate(savedInstanceState);
|
||||
getDelegate().onPostCreate(savedInstanceState);
|
||||
}
|
||||
|
||||
public ActionBar getSupportActionBar() {
|
||||
return getDelegate().getSupportActionBar();
|
||||
}
|
||||
|
||||
public void setSupportActionBar(@Nullable Toolbar toolbar) {
|
||||
getDelegate().setSupportActionBar(toolbar);
|
||||
}
|
||||
|
||||
@Override
|
||||
public MenuInflater getMenuInflater() {
|
||||
return getDelegate().getMenuInflater();
|
||||
}
|
||||
|
||||
@Override
|
||||
public void setContentView(@LayoutRes int layoutResID) {
|
||||
getDelegate().setContentView(layoutResID);
|
||||
}
|
||||
|
||||
@Override
|
||||
public void setContentView(View view) {
|
||||
getDelegate().setContentView(view);
|
||||
}
|
||||
|
||||
@Override
|
||||
public void setContentView(View view, ViewGroup.LayoutParams params) {
|
||||
getDelegate().setContentView(view, params);
|
||||
}
|
||||
|
||||
@Override
|
||||
public void addContentView(View view, ViewGroup.LayoutParams params) {
|
||||
getDelegate().addContentView(view, params);
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onPostResume() {
|
||||
super.onPostResume();
|
||||
getDelegate().onPostResume();
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onTitleChanged(CharSequence title, int color) {
|
||||
super.onTitleChanged(title, color);
|
||||
getDelegate().setTitle(title);
|
||||
}
|
||||
|
||||
@Override
|
||||
public void onConfigurationChanged(Configuration newConfig) {
|
||||
super.onConfigurationChanged(newConfig);
|
||||
getDelegate().onConfigurationChanged(newConfig);
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onStop() {
|
||||
super.onStop();
|
||||
getDelegate().onStop();
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onDestroy() {
|
||||
super.onDestroy();
|
||||
getDelegate().onDestroy();
|
||||
}
|
||||
|
||||
public void invalidateOptionsMenu() {
|
||||
getDelegate().invalidateOptionsMenu();
|
||||
}
|
||||
|
||||
private AppCompatDelegate getDelegate() {
|
||||
if (mDelegate == null) {
|
||||
mDelegate = AppCompatDelegate.create(this, null);
|
||||
}
|
||||
return mDelegate;
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,473 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.Manifest;
|
||||
import android.app.ProgressDialog;
|
||||
import android.content.ContentResolver;
|
||||
import android.content.Context;
|
||||
import android.content.Intent;
|
||||
import android.content.SharedPreferences;
|
||||
import android.content.pm.PackageManager;
|
||||
import android.database.Cursor;
|
||||
import android.graphics.Bitmap;
|
||||
import android.graphics.BitmapFactory;
|
||||
import android.media.ExifInterface;
|
||||
import android.net.Uri;
|
||||
import android.os.Bundle;
|
||||
import android.os.Environment;
|
||||
import android.os.Handler;
|
||||
import android.os.HandlerThread;
|
||||
import android.os.Message;
|
||||
import android.preference.PreferenceManager;
|
||||
import android.provider.MediaStore;
|
||||
import android.text.method.ScrollingMovementMethod;
|
||||
import android.util.Log;
|
||||
import android.view.Menu;
|
||||
import android.view.MenuInflater;
|
||||
import android.view.MenuItem;
|
||||
import android.widget.ImageView;
|
||||
import android.widget.TextView;
|
||||
import android.widget.Toast;
|
||||
|
||||
import androidx.annotation.NonNull;
|
||||
import androidx.appcompat.app.AppCompatActivity;
|
||||
import androidx.core.app.ActivityCompat;
|
||||
import androidx.core.content.ContextCompat;
|
||||
import androidx.core.content.FileProvider;
|
||||
|
||||
import java.io.File;
|
||||
import java.io.IOException;
|
||||
import java.io.InputStream;
|
||||
import java.text.SimpleDateFormat;
|
||||
import java.util.Date;
|
||||
|
||||
public class MainActivity extends AppCompatActivity {
|
||||
private static final String TAG = MainActivity.class.getSimpleName();
|
||||
public static final int OPEN_GALLERY_REQUEST_CODE = 0;
|
||||
public static final int TAKE_PHOTO_REQUEST_CODE = 1;
|
||||
|
||||
public static final int REQUEST_LOAD_MODEL = 0;
|
||||
public static final int REQUEST_RUN_MODEL = 1;
|
||||
public static final int RESPONSE_LOAD_MODEL_SUCCESSED = 0;
|
||||
public static final int RESPONSE_LOAD_MODEL_FAILED = 1;
|
||||
public static final int RESPONSE_RUN_MODEL_SUCCESSED = 2;
|
||||
public static final int RESPONSE_RUN_MODEL_FAILED = 3;
|
||||
|
||||
protected ProgressDialog pbLoadModel = null;
|
||||
protected ProgressDialog pbRunModel = null;
|
||||
|
||||
protected Handler receiver = null; // Receive messages from worker thread
|
||||
protected Handler sender = null; // Send command to worker thread
|
||||
protected HandlerThread worker = null; // Worker thread to load&run model
|
||||
|
||||
// UI components of object detection
|
||||
protected TextView tvInputSetting;
|
||||
protected ImageView ivInputImage;
|
||||
protected TextView tvOutputResult;
|
||||
protected TextView tvInferenceTime;
|
||||
|
||||
// Model settings of object detection
|
||||
protected String modelPath = "";
|
||||
protected String labelPath = "";
|
||||
protected String imagePath = "";
|
||||
protected int cpuThreadNum = 1;
|
||||
protected String cpuPowerMode = "";
|
||||
protected String inputColorFormat = "";
|
||||
protected long[] inputShape = new long[]{};
|
||||
protected float[] inputMean = new float[]{};
|
||||
protected float[] inputStd = new float[]{};
|
||||
protected float scoreThreshold = 0.1f;
|
||||
private String currentPhotoPath;
|
||||
|
||||
protected Predictor predictor = new Predictor();
|
||||
|
||||
@Override
|
||||
protected void onCreate(Bundle savedInstanceState) {
|
||||
super.onCreate(savedInstanceState);
|
||||
setContentView(R.layout.activity_main);
|
||||
|
||||
// Clear all setting items to avoid app crashing due to the incorrect settings
|
||||
SharedPreferences sharedPreferences = PreferenceManager.getDefaultSharedPreferences(this);
|
||||
SharedPreferences.Editor editor = sharedPreferences.edit();
|
||||
editor.clear();
|
||||
editor.commit();
|
||||
|
||||
// Prepare the worker thread for mode loading and inference
|
||||
receiver = new Handler() {
|
||||
@Override
|
||||
public void handleMessage(Message msg) {
|
||||
switch (msg.what) {
|
||||
case RESPONSE_LOAD_MODEL_SUCCESSED:
|
||||
pbLoadModel.dismiss();
|
||||
onLoadModelSuccessed();
|
||||
break;
|
||||
case RESPONSE_LOAD_MODEL_FAILED:
|
||||
pbLoadModel.dismiss();
|
||||
Toast.makeText(MainActivity.this, "Load model failed!", Toast.LENGTH_SHORT).show();
|
||||
onLoadModelFailed();
|
||||
break;
|
||||
case RESPONSE_RUN_MODEL_SUCCESSED:
|
||||
pbRunModel.dismiss();
|
||||
onRunModelSuccessed();
|
||||
break;
|
||||
case RESPONSE_RUN_MODEL_FAILED:
|
||||
pbRunModel.dismiss();
|
||||
Toast.makeText(MainActivity.this, "Run model failed!", Toast.LENGTH_SHORT).show();
|
||||
onRunModelFailed();
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
};
|
||||
|
||||
worker = new HandlerThread("Predictor Worker");
|
||||
worker.start();
|
||||
sender = new Handler(worker.getLooper()) {
|
||||
public void handleMessage(Message msg) {
|
||||
switch (msg.what) {
|
||||
case REQUEST_LOAD_MODEL:
|
||||
// Load model and reload test image
|
||||
if (onLoadModel()) {
|
||||
receiver.sendEmptyMessage(RESPONSE_LOAD_MODEL_SUCCESSED);
|
||||
} else {
|
||||
receiver.sendEmptyMessage(RESPONSE_LOAD_MODEL_FAILED);
|
||||
}
|
||||
break;
|
||||
case REQUEST_RUN_MODEL:
|
||||
// Run model if model is loaded
|
||||
if (onRunModel()) {
|
||||
receiver.sendEmptyMessage(RESPONSE_RUN_MODEL_SUCCESSED);
|
||||
} else {
|
||||
receiver.sendEmptyMessage(RESPONSE_RUN_MODEL_FAILED);
|
||||
}
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
};
|
||||
|
||||
// Setup the UI components
|
||||
tvInputSetting = findViewById(R.id.tv_input_setting);
|
||||
ivInputImage = findViewById(R.id.iv_input_image);
|
||||
tvInferenceTime = findViewById(R.id.tv_inference_time);
|
||||
tvOutputResult = findViewById(R.id.tv_output_result);
|
||||
tvInputSetting.setMovementMethod(ScrollingMovementMethod.getInstance());
|
||||
tvOutputResult.setMovementMethod(ScrollingMovementMethod.getInstance());
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onResume() {
|
||||
super.onResume();
|
||||
SharedPreferences sharedPreferences = PreferenceManager.getDefaultSharedPreferences(this);
|
||||
boolean settingsChanged = false;
|
||||
String model_path = sharedPreferences.getString(getString(R.string.MODEL_PATH_KEY),
|
||||
getString(R.string.MODEL_PATH_DEFAULT));
|
||||
String label_path = sharedPreferences.getString(getString(R.string.LABEL_PATH_KEY),
|
||||
getString(R.string.LABEL_PATH_DEFAULT));
|
||||
String image_path = sharedPreferences.getString(getString(R.string.IMAGE_PATH_KEY),
|
||||
getString(R.string.IMAGE_PATH_DEFAULT));
|
||||
settingsChanged |= !model_path.equalsIgnoreCase(modelPath);
|
||||
settingsChanged |= !label_path.equalsIgnoreCase(labelPath);
|
||||
settingsChanged |= !image_path.equalsIgnoreCase(imagePath);
|
||||
int cpu_thread_num = Integer.parseInt(sharedPreferences.getString(getString(R.string.CPU_THREAD_NUM_KEY),
|
||||
getString(R.string.CPU_THREAD_NUM_DEFAULT)));
|
||||
settingsChanged |= cpu_thread_num != cpuThreadNum;
|
||||
String cpu_power_mode =
|
||||
sharedPreferences.getString(getString(R.string.CPU_POWER_MODE_KEY),
|
||||
getString(R.string.CPU_POWER_MODE_DEFAULT));
|
||||
settingsChanged |= !cpu_power_mode.equalsIgnoreCase(cpuPowerMode);
|
||||
String input_color_format =
|
||||
sharedPreferences.getString(getString(R.string.INPUT_COLOR_FORMAT_KEY),
|
||||
getString(R.string.INPUT_COLOR_FORMAT_DEFAULT));
|
||||
settingsChanged |= !input_color_format.equalsIgnoreCase(inputColorFormat);
|
||||
long[] input_shape =
|
||||
Utils.parseLongsFromString(sharedPreferences.getString(getString(R.string.INPUT_SHAPE_KEY),
|
||||
getString(R.string.INPUT_SHAPE_DEFAULT)), ",");
|
||||
float[] input_mean =
|
||||
Utils.parseFloatsFromString(sharedPreferences.getString(getString(R.string.INPUT_MEAN_KEY),
|
||||
getString(R.string.INPUT_MEAN_DEFAULT)), ",");
|
||||
float[] input_std =
|
||||
Utils.parseFloatsFromString(sharedPreferences.getString(getString(R.string.INPUT_STD_KEY)
|
||||
, getString(R.string.INPUT_STD_DEFAULT)), ",");
|
||||
settingsChanged |= input_shape.length != inputShape.length;
|
||||
settingsChanged |= input_mean.length != inputMean.length;
|
||||
settingsChanged |= input_std.length != inputStd.length;
|
||||
if (!settingsChanged) {
|
||||
for (int i = 0; i < input_shape.length; i++) {
|
||||
settingsChanged |= input_shape[i] != inputShape[i];
|
||||
}
|
||||
for (int i = 0; i < input_mean.length; i++) {
|
||||
settingsChanged |= input_mean[i] != inputMean[i];
|
||||
}
|
||||
for (int i = 0; i < input_std.length; i++) {
|
||||
settingsChanged |= input_std[i] != inputStd[i];
|
||||
}
|
||||
}
|
||||
float score_threshold =
|
||||
Float.parseFloat(sharedPreferences.getString(getString(R.string.SCORE_THRESHOLD_KEY),
|
||||
getString(R.string.SCORE_THRESHOLD_DEFAULT)));
|
||||
settingsChanged |= scoreThreshold != score_threshold;
|
||||
if (settingsChanged) {
|
||||
modelPath = model_path;
|
||||
labelPath = label_path;
|
||||
imagePath = image_path;
|
||||
cpuThreadNum = cpu_thread_num;
|
||||
cpuPowerMode = cpu_power_mode;
|
||||
inputColorFormat = input_color_format;
|
||||
inputShape = input_shape;
|
||||
inputMean = input_mean;
|
||||
inputStd = input_std;
|
||||
scoreThreshold = score_threshold;
|
||||
// Update UI
|
||||
tvInputSetting.setText("Model: " + modelPath.substring(modelPath.lastIndexOf("/") + 1) + "\n" + "CPU" +
|
||||
" Thread Num: " + Integer.toString(cpuThreadNum) + "\n" + "CPU Power Mode: " + cpuPowerMode);
|
||||
tvInputSetting.scrollTo(0, 0);
|
||||
// Reload model if configure has been changed
|
||||
loadModel();
|
||||
}
|
||||
}
|
||||
|
||||
public void loadModel() {
|
||||
pbLoadModel = ProgressDialog.show(this, "", "Loading model...", false, false);
|
||||
sender.sendEmptyMessage(REQUEST_LOAD_MODEL);
|
||||
}
|
||||
|
||||
public void runModel() {
|
||||
pbRunModel = ProgressDialog.show(this, "", "Running model...", false, false);
|
||||
sender.sendEmptyMessage(REQUEST_RUN_MODEL);
|
||||
}
|
||||
|
||||
public boolean onLoadModel() {
|
||||
return predictor.init(MainActivity.this, modelPath, labelPath, cpuThreadNum,
|
||||
cpuPowerMode,
|
||||
inputColorFormat,
|
||||
inputShape, inputMean,
|
||||
inputStd, scoreThreshold);
|
||||
}
|
||||
|
||||
public boolean onRunModel() {
|
||||
return predictor.isLoaded() && predictor.runModel();
|
||||
}
|
||||
|
||||
public void onLoadModelSuccessed() {
|
||||
// Load test image from path and run model
|
||||
try {
|
||||
if (imagePath.isEmpty()) {
|
||||
return;
|
||||
}
|
||||
Bitmap image = null;
|
||||
// Read test image file from custom path if the first character of mode path is '/', otherwise read test
|
||||
// image file from assets
|
||||
if (!imagePath.substring(0, 1).equals("/")) {
|
||||
InputStream imageStream = getAssets().open(imagePath);
|
||||
image = BitmapFactory.decodeStream(imageStream);
|
||||
} else {
|
||||
if (!new File(imagePath).exists()) {
|
||||
return;
|
||||
}
|
||||
image = BitmapFactory.decodeFile(imagePath);
|
||||
}
|
||||
if (image != null && predictor.isLoaded()) {
|
||||
predictor.setInputImage(image);
|
||||
runModel();
|
||||
}
|
||||
} catch (IOException e) {
|
||||
Toast.makeText(MainActivity.this, "Load image failed!", Toast.LENGTH_SHORT).show();
|
||||
e.printStackTrace();
|
||||
}
|
||||
}
|
||||
|
||||
public void onLoadModelFailed() {
|
||||
}
|
||||
|
||||
public void onRunModelSuccessed() {
|
||||
// Obtain results and update UI
|
||||
tvInferenceTime.setText("Inference time: " + predictor.inferenceTime() + " ms");
|
||||
Bitmap outputImage = predictor.outputImage();
|
||||
if (outputImage != null) {
|
||||
ivInputImage.setImageBitmap(outputImage);
|
||||
}
|
||||
tvOutputResult.setText(predictor.outputResult());
|
||||
tvOutputResult.scrollTo(0, 0);
|
||||
}
|
||||
|
||||
public void onRunModelFailed() {
|
||||
}
|
||||
|
||||
public void onImageChanged(Bitmap image) {
|
||||
// Rerun model if users pick test image from gallery or camera
|
||||
if (image != null && predictor.isLoaded()) {
|
||||
predictor.setInputImage(image);
|
||||
runModel();
|
||||
}
|
||||
}
|
||||
|
||||
public void onSettingsClicked() {
|
||||
startActivity(new Intent(MainActivity.this, SettingsActivity.class));
|
||||
}
|
||||
|
||||
@Override
|
||||
public boolean onCreateOptionsMenu(Menu menu) {
|
||||
MenuInflater inflater = getMenuInflater();
|
||||
inflater.inflate(R.menu.menu_action_options, menu);
|
||||
return true;
|
||||
}
|
||||
|
||||
public boolean onPrepareOptionsMenu(Menu menu) {
|
||||
boolean isLoaded = predictor.isLoaded();
|
||||
menu.findItem(R.id.open_gallery).setEnabled(isLoaded);
|
||||
menu.findItem(R.id.take_photo).setEnabled(isLoaded);
|
||||
return super.onPrepareOptionsMenu(menu);
|
||||
}
|
||||
|
||||
@Override
|
||||
public boolean onOptionsItemSelected(MenuItem item) {
|
||||
switch (item.getItemId()) {
|
||||
case android.R.id.home:
|
||||
finish();
|
||||
break;
|
||||
case R.id.open_gallery:
|
||||
if (requestAllPermissions()) {
|
||||
openGallery();
|
||||
}
|
||||
break;
|
||||
case R.id.take_photo:
|
||||
if (requestAllPermissions()) {
|
||||
takePhoto();
|
||||
}
|
||||
break;
|
||||
case R.id.settings:
|
||||
if (requestAllPermissions()) {
|
||||
// Make sure we have SDCard r&w permissions to load model from SDCard
|
||||
onSettingsClicked();
|
||||
}
|
||||
break;
|
||||
}
|
||||
return super.onOptionsItemSelected(item);
|
||||
}
|
||||
|
||||
@Override
|
||||
public void onRequestPermissionsResult(int requestCode, @NonNull String[] permissions,
|
||||
@NonNull int[] grantResults) {
|
||||
super.onRequestPermissionsResult(requestCode, permissions, grantResults);
|
||||
if (grantResults[0] != PackageManager.PERMISSION_GRANTED || grantResults[1] != PackageManager.PERMISSION_GRANTED) {
|
||||
Toast.makeText(this, "Permission Denied", Toast.LENGTH_SHORT).show();
|
||||
}
|
||||
}
|
||||
|
||||
private boolean requestAllPermissions() {
|
||||
if (ContextCompat.checkSelfPermission(this, Manifest.permission.WRITE_EXTERNAL_STORAGE)
|
||||
!= PackageManager.PERMISSION_GRANTED || ContextCompat.checkSelfPermission(this,
|
||||
Manifest.permission.CAMERA)
|
||||
!= PackageManager.PERMISSION_GRANTED) {
|
||||
ActivityCompat.requestPermissions(this, new String[]{Manifest.permission.WRITE_EXTERNAL_STORAGE,
|
||||
Manifest.permission.CAMERA},
|
||||
0);
|
||||
return false;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
private void openGallery() {
|
||||
Intent intent = new Intent(Intent.ACTION_PICK, null);
|
||||
intent.setDataAndType(MediaStore.Images.Media.EXTERNAL_CONTENT_URI, "image/*");
|
||||
startActivityForResult(intent, OPEN_GALLERY_REQUEST_CODE);
|
||||
}
|
||||
|
||||
private void takePhoto() {
|
||||
Intent takePictureIntent = new Intent(MediaStore.ACTION_IMAGE_CAPTURE);
|
||||
// Ensure that there's a camera activity to handle the intent
|
||||
if (takePictureIntent.resolveActivity(getPackageManager()) != null) {
|
||||
// Create the File where the photo should go
|
||||
File photoFile = null;
|
||||
try {
|
||||
photoFile = createImageFile();
|
||||
} catch (IOException ex) {
|
||||
Log.e("MainActitity", ex.getMessage(), ex);
|
||||
Toast.makeText(MainActivity.this,
|
||||
"Create Camera temp file failed: " + ex.getMessage(), Toast.LENGTH_SHORT).show();
|
||||
}
|
||||
// Continue only if the File was successfully created
|
||||
if (photoFile != null) {
|
||||
Log.i(TAG, "FILEPATH " + getExternalFilesDir("Pictures").getAbsolutePath());
|
||||
Uri photoURI = FileProvider.getUriForFile(this,
|
||||
"com.baidu.paddle.lite.demo.ocr.fileprovider",
|
||||
photoFile);
|
||||
currentPhotoPath = photoFile.getAbsolutePath();
|
||||
takePictureIntent.putExtra(MediaStore.EXTRA_OUTPUT, photoURI);
|
||||
startActivityForResult(takePictureIntent, TAKE_PHOTO_REQUEST_CODE);
|
||||
Log.i(TAG, "startActivityForResult finished");
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
private File createImageFile() throws IOException {
|
||||
// Create an image file name
|
||||
String timeStamp = new SimpleDateFormat("yyyyMMdd_HHmmss").format(new Date());
|
||||
String imageFileName = "JPEG_" + timeStamp + "_";
|
||||
File storageDir = getExternalFilesDir(Environment.DIRECTORY_PICTURES);
|
||||
File image = File.createTempFile(
|
||||
imageFileName, /* prefix */
|
||||
".bmp", /* suffix */
|
||||
storageDir /* directory */
|
||||
);
|
||||
|
||||
return image;
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onActivityResult(int requestCode, int resultCode, Intent data) {
|
||||
super.onActivityResult(requestCode, resultCode, data);
|
||||
if (resultCode == RESULT_OK) {
|
||||
switch (requestCode) {
|
||||
case OPEN_GALLERY_REQUEST_CODE:
|
||||
if (data == null) {
|
||||
break;
|
||||
}
|
||||
try {
|
||||
ContentResolver resolver = getContentResolver();
|
||||
Uri uri = data.getData();
|
||||
Bitmap image = MediaStore.Images.Media.getBitmap(resolver, uri);
|
||||
String[] proj = {MediaStore.Images.Media.DATA};
|
||||
Cursor cursor = managedQuery(uri, proj, null, null, null);
|
||||
cursor.moveToFirst();
|
||||
onImageChanged(image);
|
||||
} catch (IOException e) {
|
||||
Log.e(TAG, e.toString());
|
||||
}
|
||||
break;
|
||||
case TAKE_PHOTO_REQUEST_CODE:
|
||||
if (currentPhotoPath != null) {
|
||||
ExifInterface exif = null;
|
||||
try {
|
||||
exif = new ExifInterface(currentPhotoPath);
|
||||
} catch (IOException e) {
|
||||
e.printStackTrace();
|
||||
}
|
||||
int orientation = exif.getAttributeInt(ExifInterface.TAG_ORIENTATION,
|
||||
ExifInterface.ORIENTATION_UNDEFINED);
|
||||
Log.i(TAG, "rotation " + orientation);
|
||||
Bitmap image = BitmapFactory.decodeFile(currentPhotoPath);
|
||||
image = Utils.rotateBitmap(image, orientation);
|
||||
onImageChanged(image);
|
||||
} else {
|
||||
Log.e(TAG, "currentPhotoPath is null");
|
||||
}
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onDestroy() {
|
||||
if (predictor != null) {
|
||||
predictor.releaseModel();
|
||||
}
|
||||
worker.quit();
|
||||
super.onDestroy();
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,157 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.graphics.Bitmap;
|
||||
import android.graphics.BitmapFactory;
|
||||
import android.os.Build;
|
||||
import android.os.Bundle;
|
||||
import android.os.Handler;
|
||||
import android.os.HandlerThread;
|
||||
import android.os.Message;
|
||||
import android.util.Log;
|
||||
import android.view.View;
|
||||
import android.widget.Button;
|
||||
import android.widget.ImageView;
|
||||
import android.widget.TextView;
|
||||
import android.widget.Toast;
|
||||
|
||||
import androidx.appcompat.app.AppCompatActivity;
|
||||
|
||||
import java.io.IOException;
|
||||
import java.io.InputStream;
|
||||
|
||||
public class MiniActivity extends AppCompatActivity {
|
||||
|
||||
|
||||
public static final int REQUEST_LOAD_MODEL = 0;
|
||||
public static final int REQUEST_RUN_MODEL = 1;
|
||||
public static final int REQUEST_UNLOAD_MODEL = 2;
|
||||
public static final int RESPONSE_LOAD_MODEL_SUCCESSED = 0;
|
||||
public static final int RESPONSE_LOAD_MODEL_FAILED = 1;
|
||||
public static final int RESPONSE_RUN_MODEL_SUCCESSED = 2;
|
||||
public static final int RESPONSE_RUN_MODEL_FAILED = 3;
|
||||
|
||||
private static final String TAG = "MiniActivity";
|
||||
|
||||
protected Handler receiver = null; // Receive messages from worker thread
|
||||
protected Handler sender = null; // Send command to worker thread
|
||||
protected HandlerThread worker = null; // Worker thread to load&run model
|
||||
protected volatile Predictor predictor = null;
|
||||
|
||||
private String assetModelDirPath = "models/ocr_v1_for_cpu";
|
||||
private String assetlabelFilePath = "labels/ppocr_keys_v1.txt";
|
||||
|
||||
private Button button;
|
||||
private ImageView imageView; // image result
|
||||
private TextView textView; // text result
|
||||
|
||||
@Override
|
||||
protected void onCreate(Bundle savedInstanceState) {
|
||||
super.onCreate(savedInstanceState);
|
||||
setContentView(R.layout.activity_mini);
|
||||
|
||||
Log.i(TAG, "SHOW in Logcat");
|
||||
|
||||
// Prepare the worker thread for mode loading and inference
|
||||
worker = new HandlerThread("Predictor Worker");
|
||||
worker.start();
|
||||
sender = new Handler(worker.getLooper()) {
|
||||
public void handleMessage(Message msg) {
|
||||
switch (msg.what) {
|
||||
case REQUEST_LOAD_MODEL:
|
||||
// Load model and reload test image
|
||||
if (!onLoadModel()) {
|
||||
runOnUiThread(new Runnable() {
|
||||
@Override
|
||||
public void run() {
|
||||
Toast.makeText(MiniActivity.this, "Load model failed!", Toast.LENGTH_SHORT).show();
|
||||
}
|
||||
});
|
||||
}
|
||||
break;
|
||||
case REQUEST_RUN_MODEL:
|
||||
// Run model if model is loaded
|
||||
final boolean isSuccessed = onRunModel();
|
||||
runOnUiThread(new Runnable() {
|
||||
@Override
|
||||
public void run() {
|
||||
if (isSuccessed){
|
||||
onRunModelSuccessed();
|
||||
}else{
|
||||
Toast.makeText(MiniActivity.this, "Run model failed!", Toast.LENGTH_SHORT).show();
|
||||
}
|
||||
}
|
||||
});
|
||||
break;
|
||||
}
|
||||
}
|
||||
};
|
||||
sender.sendEmptyMessage(REQUEST_LOAD_MODEL); // corresponding to REQUEST_LOAD_MODEL, to call onLoadModel()
|
||||
|
||||
imageView = findViewById(R.id.imageView);
|
||||
textView = findViewById(R.id.sample_text);
|
||||
button = findViewById(R.id.button);
|
||||
button.setOnClickListener(new View.OnClickListener() {
|
||||
@Override
|
||||
public void onClick(View v) {
|
||||
sender.sendEmptyMessage(REQUEST_RUN_MODEL);
|
||||
}
|
||||
});
|
||||
|
||||
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onDestroy() {
|
||||
onUnloadModel();
|
||||
if (Build.VERSION.SDK_INT >= Build.VERSION_CODES.JELLY_BEAN_MR2) {
|
||||
worker.quitSafely();
|
||||
} else {
|
||||
worker.quit();
|
||||
}
|
||||
super.onDestroy();
|
||||
}
|
||||
|
||||
/**
|
||||
* call in onCreate, model init
|
||||
*
|
||||
* @return
|
||||
*/
|
||||
private boolean onLoadModel() {
|
||||
if (predictor == null) {
|
||||
predictor = new Predictor();
|
||||
}
|
||||
return predictor.init(this, assetModelDirPath, assetlabelFilePath);
|
||||
}
|
||||
|
||||
/**
|
||||
* init engine
|
||||
* call in onCreate
|
||||
*
|
||||
* @return
|
||||
*/
|
||||
private boolean onRunModel() {
|
||||
try {
|
||||
String assetImagePath = "images/5.jpg";
|
||||
InputStream imageStream = getAssets().open(assetImagePath);
|
||||
Bitmap image = BitmapFactory.decodeStream(imageStream);
|
||||
// Input is Bitmap
|
||||
predictor.setInputImage(image);
|
||||
return predictor.isLoaded() && predictor.runModel();
|
||||
} catch (IOException e) {
|
||||
e.printStackTrace();
|
||||
return false;
|
||||
}
|
||||
}
|
||||
|
||||
private void onRunModelSuccessed() {
|
||||
Log.i(TAG, "onRunModelSuccessed");
|
||||
textView.setText(predictor.outputResult);
|
||||
imageView.setImageBitmap(predictor.outputImage);
|
||||
}
|
||||
|
||||
private void onUnloadModel() {
|
||||
if (predictor != null) {
|
||||
predictor.releaseModel();
|
||||
}
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,100 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.graphics.Bitmap;
|
||||
import android.util.Log;
|
||||
|
||||
import java.util.ArrayList;
|
||||
import java.util.concurrent.atomic.AtomicBoolean;
|
||||
|
||||
public class OCRPredictorNative {
|
||||
|
||||
private static final AtomicBoolean isSOLoaded = new AtomicBoolean();
|
||||
|
||||
public static void loadLibrary() throws RuntimeException {
|
||||
if (!isSOLoaded.get() && isSOLoaded.compareAndSet(false, true)) {
|
||||
try {
|
||||
System.loadLibrary("Native");
|
||||
} catch (Throwable e) {
|
||||
RuntimeException exception = new RuntimeException(
|
||||
"Load libNative.so failed, please check it exists in apk file.", e);
|
||||
throw exception;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
private Config config;
|
||||
|
||||
private long nativePointer = 0;
|
||||
|
||||
public OCRPredictorNative(Config config) {
|
||||
this.config = config;
|
||||
loadLibrary();
|
||||
nativePointer = init(config.detModelFilename, config.recModelFilename,
|
||||
config.cpuThreadNum, config.cpuPower);
|
||||
Log.i("OCRPredictorNative", "load success " + nativePointer);
|
||||
|
||||
}
|
||||
|
||||
public void release() {
|
||||
if (nativePointer != 0) {
|
||||
nativePointer = 0;
|
||||
destory(nativePointer);
|
||||
}
|
||||
}
|
||||
|
||||
public ArrayList<OcrResultModel> runImage(float[] inputData, int width, int height, int channels, Bitmap originalImage) {
|
||||
Log.i("OCRPredictorNative", "begin to run image " + inputData.length + " " + width + " " + height);
|
||||
float[] dims = new float[]{1, channels, height, width};
|
||||
float[] rawResults = forward(nativePointer, inputData, dims, originalImage);
|
||||
ArrayList<OcrResultModel> results = postprocess(rawResults);
|
||||
return results;
|
||||
}
|
||||
|
||||
public static class Config {
|
||||
public int cpuThreadNum;
|
||||
public String cpuPower;
|
||||
public String detModelFilename;
|
||||
public String recModelFilename;
|
||||
|
||||
}
|
||||
|
||||
protected native long init(String detModelPath, String recModelPath, int threadNum, String cpuMode);
|
||||
|
||||
protected native float[] forward(long pointer, float[] buf, float[] ddims, Bitmap originalImage);
|
||||
|
||||
protected native void destory(long pointer);
|
||||
|
||||
private ArrayList<OcrResultModel> postprocess(float[] raw) {
|
||||
ArrayList<OcrResultModel> results = new ArrayList<OcrResultModel>();
|
||||
int begin = 0;
|
||||
|
||||
while (begin < raw.length) {
|
||||
int point_num = Math.round(raw[begin]);
|
||||
int word_num = Math.round(raw[begin + 1]);
|
||||
OcrResultModel model = parse(raw, begin + 2, point_num, word_num);
|
||||
begin += 2 + 1 + point_num * 2 + word_num;
|
||||
results.add(model);
|
||||
}
|
||||
|
||||
return results;
|
||||
}
|
||||
|
||||
private OcrResultModel parse(float[] raw, int begin, int pointNum, int wordNum) {
|
||||
int current = begin;
|
||||
OcrResultModel model = new OcrResultModel();
|
||||
model.setConfidence(raw[current]);
|
||||
current++;
|
||||
for (int i = 0; i < pointNum; i++) {
|
||||
model.addPoints(Math.round(raw[current + i * 2]), Math.round(raw[current + i * 2 + 1]));
|
||||
}
|
||||
current += (pointNum * 2);
|
||||
for (int i = 0; i < wordNum; i++) {
|
||||
int index = Math.round(raw[current + i]);
|
||||
model.addWordIndex(index);
|
||||
}
|
||||
Log.i("OCRPredictorNative", "word finished " + wordNum);
|
||||
return model;
|
||||
}
|
||||
|
||||
|
||||
}
|
||||
|
|
@ -0,0 +1,52 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.graphics.Point;
|
||||
|
||||
import java.util.ArrayList;
|
||||
import java.util.List;
|
||||
|
||||
public class OcrResultModel {
|
||||
private List<Point> points;
|
||||
private List<Integer> wordIndex;
|
||||
private String label;
|
||||
private float confidence;
|
||||
|
||||
public OcrResultModel() {
|
||||
super();
|
||||
points = new ArrayList<>();
|
||||
wordIndex = new ArrayList<>();
|
||||
}
|
||||
|
||||
public void addPoints(int x, int y) {
|
||||
Point point = new Point(x, y);
|
||||
points.add(point);
|
||||
}
|
||||
|
||||
public void addWordIndex(int index) {
|
||||
wordIndex.add(index);
|
||||
}
|
||||
|
||||
public List<Point> getPoints() {
|
||||
return points;
|
||||
}
|
||||
|
||||
public List<Integer> getWordIndex() {
|
||||
return wordIndex;
|
||||
}
|
||||
|
||||
public String getLabel() {
|
||||
return label;
|
||||
}
|
||||
|
||||
public void setLabel(String label) {
|
||||
this.label = label;
|
||||
}
|
||||
|
||||
public float getConfidence() {
|
||||
return confidence;
|
||||
}
|
||||
|
||||
public void setConfidence(float confidence) {
|
||||
this.confidence = confidence;
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,355 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.content.Context;
|
||||
import android.graphics.Bitmap;
|
||||
import android.graphics.Canvas;
|
||||
import android.graphics.Color;
|
||||
import android.graphics.Paint;
|
||||
import android.graphics.Path;
|
||||
import android.graphics.Point;
|
||||
import android.util.Log;
|
||||
|
||||
import java.io.File;
|
||||
import java.io.InputStream;
|
||||
import java.util.ArrayList;
|
||||
import java.util.Date;
|
||||
import java.util.List;
|
||||
import java.util.Vector;
|
||||
|
||||
import static android.graphics.Color.*;
|
||||
|
||||
public class Predictor {
|
||||
private static final String TAG = Predictor.class.getSimpleName();
|
||||
public boolean isLoaded = false;
|
||||
public int warmupIterNum = 1;
|
||||
public int inferIterNum = 1;
|
||||
public int cpuThreadNum = 4;
|
||||
public String cpuPowerMode = "LITE_POWER_HIGH";
|
||||
public String modelPath = "";
|
||||
public String modelName = "";
|
||||
protected OCRPredictorNative paddlePredictor = null;
|
||||
protected float inferenceTime = 0;
|
||||
// Only for object detection
|
||||
protected Vector<String> wordLabels = new Vector<String>();
|
||||
protected String inputColorFormat = "BGR";
|
||||
protected long[] inputShape = new long[]{1, 3, 960};
|
||||
protected float[] inputMean = new float[]{0.485f, 0.456f, 0.406f};
|
||||
protected float[] inputStd = new float[]{1.0f / 0.229f, 1.0f / 0.224f, 1.0f / 0.225f};
|
||||
protected float scoreThreshold = 0.1f;
|
||||
protected Bitmap inputImage = null;
|
||||
protected Bitmap outputImage = null;
|
||||
protected volatile String outputResult = "";
|
||||
protected float preprocessTime = 0;
|
||||
protected float postprocessTime = 0;
|
||||
|
||||
|
||||
public Predictor() {
|
||||
}
|
||||
|
||||
public boolean init(Context appCtx, String modelPath, String labelPath) {
|
||||
isLoaded = loadModel(appCtx, modelPath, cpuThreadNum, cpuPowerMode);
|
||||
if (!isLoaded) {
|
||||
return false;
|
||||
}
|
||||
isLoaded = loadLabel(appCtx, labelPath);
|
||||
return isLoaded;
|
||||
}
|
||||
|
||||
|
||||
public boolean init(Context appCtx, String modelPath, String labelPath, int cpuThreadNum, String cpuPowerMode,
|
||||
String inputColorFormat,
|
||||
long[] inputShape, float[] inputMean,
|
||||
float[] inputStd, float scoreThreshold) {
|
||||
if (inputShape.length != 3) {
|
||||
Log.e(TAG, "Size of input shape should be: 3");
|
||||
return false;
|
||||
}
|
||||
if (inputMean.length != inputShape[1]) {
|
||||
Log.e(TAG, "Size of input mean should be: " + Long.toString(inputShape[1]));
|
||||
return false;
|
||||
}
|
||||
if (inputStd.length != inputShape[1]) {
|
||||
Log.e(TAG, "Size of input std should be: " + Long.toString(inputShape[1]));
|
||||
return false;
|
||||
}
|
||||
if (inputShape[0] != 1) {
|
||||
Log.e(TAG, "Only one batch is supported in the image classification demo, you can use any batch size in " +
|
||||
"your Apps!");
|
||||
return false;
|
||||
}
|
||||
if (inputShape[1] != 1 && inputShape[1] != 3) {
|
||||
Log.e(TAG, "Only one/three channels are supported in the image classification demo, you can use any " +
|
||||
"channel size in your Apps!");
|
||||
return false;
|
||||
}
|
||||
if (!inputColorFormat.equalsIgnoreCase("BGR")) {
|
||||
Log.e(TAG, "Only BGR color format is supported.");
|
||||
return false;
|
||||
}
|
||||
boolean isLoaded = init(appCtx, modelPath, labelPath);
|
||||
if (!isLoaded) {
|
||||
return false;
|
||||
}
|
||||
this.inputColorFormat = inputColorFormat;
|
||||
this.inputShape = inputShape;
|
||||
this.inputMean = inputMean;
|
||||
this.inputStd = inputStd;
|
||||
this.scoreThreshold = scoreThreshold;
|
||||
return true;
|
||||
}
|
||||
|
||||
protected boolean loadModel(Context appCtx, String modelPath, int cpuThreadNum, String cpuPowerMode) {
|
||||
// Release model if exists
|
||||
releaseModel();
|
||||
|
||||
// Load model
|
||||
if (modelPath.isEmpty()) {
|
||||
return false;
|
||||
}
|
||||
String realPath = modelPath;
|
||||
if (!modelPath.substring(0, 1).equals("/")) {
|
||||
// Read model files from custom path if the first character of mode path is '/'
|
||||
// otherwise copy model to cache from assets
|
||||
realPath = appCtx.getCacheDir() + "/" + modelPath;
|
||||
Utils.copyDirectoryFromAssets(appCtx, modelPath, realPath);
|
||||
}
|
||||
if (realPath.isEmpty()) {
|
||||
return false;
|
||||
}
|
||||
|
||||
OCRPredictorNative.Config config = new OCRPredictorNative.Config();
|
||||
config.cpuThreadNum = cpuThreadNum;
|
||||
config.detModelFilename = realPath + File.separator + "ch_det_mv3_db_opt.nb";
|
||||
config.recModelFilename = realPath + File.separator + "ch_rec_mv3_crnn_opt.nb";
|
||||
Log.e("Predictor", "model path" + config.detModelFilename + " ; " + config.recModelFilename);
|
||||
config.cpuPower = cpuPowerMode;
|
||||
paddlePredictor = new OCRPredictorNative(config);
|
||||
|
||||
this.cpuThreadNum = cpuThreadNum;
|
||||
this.cpuPowerMode = cpuPowerMode;
|
||||
this.modelPath = realPath;
|
||||
this.modelName = realPath.substring(realPath.lastIndexOf("/") + 1);
|
||||
return true;
|
||||
}
|
||||
|
||||
public void releaseModel() {
|
||||
if (paddlePredictor != null) {
|
||||
paddlePredictor.release();
|
||||
paddlePredictor = null;
|
||||
}
|
||||
isLoaded = false;
|
||||
cpuThreadNum = 1;
|
||||
cpuPowerMode = "LITE_POWER_HIGH";
|
||||
modelPath = "";
|
||||
modelName = "";
|
||||
}
|
||||
|
||||
protected boolean loadLabel(Context appCtx, String labelPath) {
|
||||
wordLabels.clear();
|
||||
// Load word labels from file
|
||||
try {
|
||||
InputStream assetsInputStream = appCtx.getAssets().open(labelPath);
|
||||
int available = assetsInputStream.available();
|
||||
byte[] lines = new byte[available];
|
||||
assetsInputStream.read(lines);
|
||||
assetsInputStream.close();
|
||||
String words = new String(lines);
|
||||
String[] contents = words.split("\n");
|
||||
for (String content : contents) {
|
||||
wordLabels.add(content);
|
||||
}
|
||||
Log.i(TAG, "Word label size: " + wordLabels.size());
|
||||
} catch (Exception e) {
|
||||
Log.e(TAG, e.getMessage());
|
||||
return false;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
|
||||
public boolean runModel() {
|
||||
if (inputImage == null || !isLoaded()) {
|
||||
return false;
|
||||
}
|
||||
|
||||
// Pre-process image, and feed input tensor with pre-processed data
|
||||
|
||||
Bitmap scaleImage = Utils.resizeWithStep(inputImage, Long.valueOf(inputShape[2]).intValue(), 32);
|
||||
|
||||
Date start = new Date();
|
||||
int channels = (int) inputShape[1];
|
||||
int width = scaleImage.getWidth();
|
||||
int height = scaleImage.getHeight();
|
||||
float[] inputData = new float[channels * width * height];
|
||||
if (channels == 3) {
|
||||
int[] channelIdx = null;
|
||||
if (inputColorFormat.equalsIgnoreCase("RGB")) {
|
||||
channelIdx = new int[]{0, 1, 2};
|
||||
} else if (inputColorFormat.equalsIgnoreCase("BGR")) {
|
||||
channelIdx = new int[]{2, 1, 0};
|
||||
} else {
|
||||
Log.i(TAG, "Unknown color format " + inputColorFormat + ", only RGB and BGR color format is " +
|
||||
"supported!");
|
||||
return false;
|
||||
}
|
||||
int[] channelStride = new int[]{width * height, width * height * 2};
|
||||
int p = scaleImage.getPixel(scaleImage.getWidth() - 1, scaleImage.getHeight() - 1);
|
||||
for (int y = 0; y < height; y++) {
|
||||
for (int x = 0; x < width; x++) {
|
||||
int color = scaleImage.getPixel(x, y);
|
||||
float[] rgb = new float[]{(float) red(color) / 255.0f, (float) green(color) / 255.0f,
|
||||
(float) blue(color) / 255.0f};
|
||||
inputData[y * width + x] = (rgb[channelIdx[0]] - inputMean[0]) / inputStd[0];
|
||||
inputData[y * width + x + channelStride[0]] = (rgb[channelIdx[1]] - inputMean[1]) / inputStd[1];
|
||||
inputData[y * width + x + channelStride[1]] = (rgb[channelIdx[2]] - inputMean[2]) / inputStd[2];
|
||||
|
||||
}
|
||||
}
|
||||
} else if (channels == 1) {
|
||||
for (int y = 0; y < height; y++) {
|
||||
for (int x = 0; x < width; x++) {
|
||||
int color = inputImage.getPixel(x, y);
|
||||
float gray = (float) (red(color) + green(color) + blue(color)) / 3.0f / 255.0f;
|
||||
inputData[y * width + x] = (gray - inputMean[0]) / inputStd[0];
|
||||
}
|
||||
}
|
||||
} else {
|
||||
Log.i(TAG, "Unsupported channel size " + Integer.toString(channels) + ", only channel 1 and 3 is " +
|
||||
"supported!");
|
||||
return false;
|
||||
}
|
||||
float[] pixels = inputData;
|
||||
Log.i(TAG, "pixels " + pixels[0] + " " + pixels[1] + " " + pixels[2] + " " + pixels[3]
|
||||
+ " " + pixels[pixels.length / 2] + " " + pixels[pixels.length / 2 + 1] + " " + pixels[pixels.length - 2] + " " + pixels[pixels.length - 1]);
|
||||
Date end = new Date();
|
||||
preprocessTime = (float) (end.getTime() - start.getTime());
|
||||
|
||||
// Warm up
|
||||
for (int i = 0; i < warmupIterNum; i++) {
|
||||
paddlePredictor.runImage(inputData, width, height, channels, inputImage);
|
||||
}
|
||||
warmupIterNum = 0; // do not need warm
|
||||
// Run inference
|
||||
start = new Date();
|
||||
ArrayList<OcrResultModel> results = paddlePredictor.runImage(inputData, width, height, channels, inputImage);
|
||||
end = new Date();
|
||||
inferenceTime = (end.getTime() - start.getTime()) / (float) inferIterNum;
|
||||
|
||||
results = postprocess(results);
|
||||
Log.i(TAG, "[stat] Preprocess Time: " + preprocessTime
|
||||
+ " ; Inference Time: " + inferenceTime + " ;Box Size " + results.size());
|
||||
drawResults(results);
|
||||
|
||||
return true;
|
||||
}
|
||||
|
||||
|
||||
public boolean isLoaded() {
|
||||
return paddlePredictor != null && isLoaded;
|
||||
}
|
||||
|
||||
public String modelPath() {
|
||||
return modelPath;
|
||||
}
|
||||
|
||||
public String modelName() {
|
||||
return modelName;
|
||||
}
|
||||
|
||||
public int cpuThreadNum() {
|
||||
return cpuThreadNum;
|
||||
}
|
||||
|
||||
public String cpuPowerMode() {
|
||||
return cpuPowerMode;
|
||||
}
|
||||
|
||||
public float inferenceTime() {
|
||||
return inferenceTime;
|
||||
}
|
||||
|
||||
public Bitmap inputImage() {
|
||||
return inputImage;
|
||||
}
|
||||
|
||||
public Bitmap outputImage() {
|
||||
return outputImage;
|
||||
}
|
||||
|
||||
public String outputResult() {
|
||||
return outputResult;
|
||||
}
|
||||
|
||||
public float preprocessTime() {
|
||||
return preprocessTime;
|
||||
}
|
||||
|
||||
public float postprocessTime() {
|
||||
return postprocessTime;
|
||||
}
|
||||
|
||||
|
||||
public void setInputImage(Bitmap image) {
|
||||
if (image == null) {
|
||||
return;
|
||||
}
|
||||
this.inputImage = image.copy(Bitmap.Config.ARGB_8888, true);
|
||||
}
|
||||
|
||||
private ArrayList<OcrResultModel> postprocess(ArrayList<OcrResultModel> results) {
|
||||
for (OcrResultModel r : results) {
|
||||
StringBuffer word = new StringBuffer();
|
||||
for (int index : r.getWordIndex()) {
|
||||
if (index >= 0 && index < wordLabels.size()) {
|
||||
word.append(wordLabels.get(index));
|
||||
} else {
|
||||
Log.e(TAG, "Word index is not in label list:" + index);
|
||||
word.append("×");
|
||||
}
|
||||
}
|
||||
r.setLabel(word.toString());
|
||||
}
|
||||
return results;
|
||||
}
|
||||
|
||||
private void drawResults(ArrayList<OcrResultModel> results) {
|
||||
StringBuffer outputResultSb = new StringBuffer("");
|
||||
for (int i = 0; i < results.size(); i++) {
|
||||
OcrResultModel result = results.get(i);
|
||||
StringBuilder sb = new StringBuilder("");
|
||||
sb.append(result.getLabel());
|
||||
sb.append(" ").append(result.getConfidence());
|
||||
sb.append("; Points: ");
|
||||
for (Point p : result.getPoints()) {
|
||||
sb.append("(").append(p.x).append(",").append(p.y).append(") ");
|
||||
}
|
||||
Log.i(TAG, sb.toString()); // show LOG in Logcat panel
|
||||
outputResultSb.append(i + 1).append(": ").append(result.getLabel()).append("\n");
|
||||
}
|
||||
outputResult = outputResultSb.toString();
|
||||
outputImage = inputImage;
|
||||
Canvas canvas = new Canvas(outputImage);
|
||||
Paint paintFillAlpha = new Paint();
|
||||
paintFillAlpha.setStyle(Paint.Style.FILL);
|
||||
paintFillAlpha.setColor(Color.parseColor("#3B85F5"));
|
||||
paintFillAlpha.setAlpha(50);
|
||||
|
||||
Paint paint = new Paint();
|
||||
paint.setColor(Color.parseColor("#3B85F5"));
|
||||
paint.setStrokeWidth(5);
|
||||
paint.setStyle(Paint.Style.STROKE);
|
||||
|
||||
for (OcrResultModel result : results) {
|
||||
Path path = new Path();
|
||||
List<Point> points = result.getPoints();
|
||||
path.moveTo(points.get(0).x, points.get(0).y);
|
||||
for (int i = points.size() - 1; i >= 0; i--) {
|
||||
Point p = points.get(i);
|
||||
path.lineTo(p.x, p.y);
|
||||
}
|
||||
canvas.drawPath(path, paint);
|
||||
canvas.drawPath(path, paintFillAlpha);
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
|
@ -0,0 +1,201 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.content.SharedPreferences;
|
||||
import android.os.Bundle;
|
||||
import android.preference.CheckBoxPreference;
|
||||
import android.preference.EditTextPreference;
|
||||
import android.preference.ListPreference;
|
||||
|
||||
import androidx.appcompat.app.ActionBar;
|
||||
|
||||
import java.util.ArrayList;
|
||||
import java.util.List;
|
||||
|
||||
|
||||
public class SettingsActivity extends AppCompatPreferenceActivity implements SharedPreferences.OnSharedPreferenceChangeListener {
|
||||
ListPreference lpChoosePreInstalledModel = null;
|
||||
CheckBoxPreference cbEnableCustomSettings = null;
|
||||
EditTextPreference etModelPath = null;
|
||||
EditTextPreference etLabelPath = null;
|
||||
EditTextPreference etImagePath = null;
|
||||
ListPreference lpCPUThreadNum = null;
|
||||
ListPreference lpCPUPowerMode = null;
|
||||
ListPreference lpInputColorFormat = null;
|
||||
EditTextPreference etInputShape = null;
|
||||
EditTextPreference etInputMean = null;
|
||||
EditTextPreference etInputStd = null;
|
||||
EditTextPreference etScoreThreshold = null;
|
||||
|
||||
List<String> preInstalledModelPaths = null;
|
||||
List<String> preInstalledLabelPaths = null;
|
||||
List<String> preInstalledImagePaths = null;
|
||||
List<String> preInstalledInputShapes = null;
|
||||
List<String> preInstalledCPUThreadNums = null;
|
||||
List<String> preInstalledCPUPowerModes = null;
|
||||
List<String> preInstalledInputColorFormats = null;
|
||||
List<String> preInstalledInputMeans = null;
|
||||
List<String> preInstalledInputStds = null;
|
||||
List<String> preInstalledScoreThresholds = null;
|
||||
|
||||
@Override
|
||||
public void onCreate(Bundle savedInstanceState) {
|
||||
super.onCreate(savedInstanceState);
|
||||
addPreferencesFromResource(R.xml.settings);
|
||||
ActionBar supportActionBar = getSupportActionBar();
|
||||
if (supportActionBar != null) {
|
||||
supportActionBar.setDisplayHomeAsUpEnabled(true);
|
||||
}
|
||||
|
||||
// Initialized pre-installed models
|
||||
preInstalledModelPaths = new ArrayList<String>();
|
||||
preInstalledLabelPaths = new ArrayList<String>();
|
||||
preInstalledImagePaths = new ArrayList<String>();
|
||||
preInstalledInputShapes = new ArrayList<String>();
|
||||
preInstalledCPUThreadNums = new ArrayList<String>();
|
||||
preInstalledCPUPowerModes = new ArrayList<String>();
|
||||
preInstalledInputColorFormats = new ArrayList<String>();
|
||||
preInstalledInputMeans = new ArrayList<String>();
|
||||
preInstalledInputStds = new ArrayList<String>();
|
||||
preInstalledScoreThresholds = new ArrayList<String>();
|
||||
// Add ssd_mobilenet_v1_pascalvoc_for_cpu
|
||||
preInstalledModelPaths.add(getString(R.string.MODEL_PATH_DEFAULT));
|
||||
preInstalledLabelPaths.add(getString(R.string.LABEL_PATH_DEFAULT));
|
||||
preInstalledImagePaths.add(getString(R.string.IMAGE_PATH_DEFAULT));
|
||||
preInstalledCPUThreadNums.add(getString(R.string.CPU_THREAD_NUM_DEFAULT));
|
||||
preInstalledCPUPowerModes.add(getString(R.string.CPU_POWER_MODE_DEFAULT));
|
||||
preInstalledInputColorFormats.add(getString(R.string.INPUT_COLOR_FORMAT_DEFAULT));
|
||||
preInstalledInputShapes.add(getString(R.string.INPUT_SHAPE_DEFAULT));
|
||||
preInstalledInputMeans.add(getString(R.string.INPUT_MEAN_DEFAULT));
|
||||
preInstalledInputStds.add(getString(R.string.INPUT_STD_DEFAULT));
|
||||
preInstalledScoreThresholds.add(getString(R.string.SCORE_THRESHOLD_DEFAULT));
|
||||
|
||||
// Setup UI components
|
||||
lpChoosePreInstalledModel =
|
||||
(ListPreference) findPreference(getString(R.string.CHOOSE_PRE_INSTALLED_MODEL_KEY));
|
||||
String[] preInstalledModelNames = new String[preInstalledModelPaths.size()];
|
||||
for (int i = 0; i < preInstalledModelPaths.size(); i++) {
|
||||
preInstalledModelNames[i] =
|
||||
preInstalledModelPaths.get(i).substring(preInstalledModelPaths.get(i).lastIndexOf("/") + 1);
|
||||
}
|
||||
lpChoosePreInstalledModel.setEntries(preInstalledModelNames);
|
||||
lpChoosePreInstalledModel.setEntryValues(preInstalledModelPaths.toArray(new String[preInstalledModelPaths.size()]));
|
||||
cbEnableCustomSettings =
|
||||
(CheckBoxPreference) findPreference(getString(R.string.ENABLE_CUSTOM_SETTINGS_KEY));
|
||||
etModelPath = (EditTextPreference) findPreference(getString(R.string.MODEL_PATH_KEY));
|
||||
etModelPath.setTitle("Model Path (SDCard: " + Utils.getSDCardDirectory() + ")");
|
||||
etLabelPath = (EditTextPreference) findPreference(getString(R.string.LABEL_PATH_KEY));
|
||||
etImagePath = (EditTextPreference) findPreference(getString(R.string.IMAGE_PATH_KEY));
|
||||
lpCPUThreadNum =
|
||||
(ListPreference) findPreference(getString(R.string.CPU_THREAD_NUM_KEY));
|
||||
lpCPUPowerMode =
|
||||
(ListPreference) findPreference(getString(R.string.CPU_POWER_MODE_KEY));
|
||||
lpInputColorFormat =
|
||||
(ListPreference) findPreference(getString(R.string.INPUT_COLOR_FORMAT_KEY));
|
||||
etInputShape = (EditTextPreference) findPreference(getString(R.string.INPUT_SHAPE_KEY));
|
||||
etInputMean = (EditTextPreference) findPreference(getString(R.string.INPUT_MEAN_KEY));
|
||||
etInputStd = (EditTextPreference) findPreference(getString(R.string.INPUT_STD_KEY));
|
||||
etScoreThreshold = (EditTextPreference) findPreference(getString(R.string.SCORE_THRESHOLD_KEY));
|
||||
}
|
||||
|
||||
private void reloadPreferenceAndUpdateUI() {
|
||||
SharedPreferences sharedPreferences = getPreferenceScreen().getSharedPreferences();
|
||||
boolean enableCustomSettings =
|
||||
sharedPreferences.getBoolean(getString(R.string.ENABLE_CUSTOM_SETTINGS_KEY), false);
|
||||
String modelPath = sharedPreferences.getString(getString(R.string.CHOOSE_PRE_INSTALLED_MODEL_KEY),
|
||||
getString(R.string.MODEL_PATH_DEFAULT));
|
||||
int modelIdx = lpChoosePreInstalledModel.findIndexOfValue(modelPath);
|
||||
if (modelIdx >= 0 && modelIdx < preInstalledModelPaths.size()) {
|
||||
if (!enableCustomSettings) {
|
||||
SharedPreferences.Editor editor = sharedPreferences.edit();
|
||||
editor.putString(getString(R.string.MODEL_PATH_KEY), preInstalledModelPaths.get(modelIdx));
|
||||
editor.putString(getString(R.string.LABEL_PATH_KEY), preInstalledLabelPaths.get(modelIdx));
|
||||
editor.putString(getString(R.string.IMAGE_PATH_KEY), preInstalledImagePaths.get(modelIdx));
|
||||
editor.putString(getString(R.string.CPU_THREAD_NUM_KEY), preInstalledCPUThreadNums.get(modelIdx));
|
||||
editor.putString(getString(R.string.CPU_POWER_MODE_KEY), preInstalledCPUPowerModes.get(modelIdx));
|
||||
editor.putString(getString(R.string.INPUT_COLOR_FORMAT_KEY),
|
||||
preInstalledInputColorFormats.get(modelIdx));
|
||||
editor.putString(getString(R.string.INPUT_SHAPE_KEY), preInstalledInputShapes.get(modelIdx));
|
||||
editor.putString(getString(R.string.INPUT_MEAN_KEY), preInstalledInputMeans.get(modelIdx));
|
||||
editor.putString(getString(R.string.INPUT_STD_KEY), preInstalledInputStds.get(modelIdx));
|
||||
editor.putString(getString(R.string.SCORE_THRESHOLD_KEY),
|
||||
preInstalledScoreThresholds.get(modelIdx));
|
||||
editor.commit();
|
||||
}
|
||||
lpChoosePreInstalledModel.setSummary(modelPath);
|
||||
}
|
||||
cbEnableCustomSettings.setChecked(enableCustomSettings);
|
||||
etModelPath.setEnabled(enableCustomSettings);
|
||||
etLabelPath.setEnabled(enableCustomSettings);
|
||||
etImagePath.setEnabled(enableCustomSettings);
|
||||
lpCPUThreadNum.setEnabled(enableCustomSettings);
|
||||
lpCPUPowerMode.setEnabled(enableCustomSettings);
|
||||
lpInputColorFormat.setEnabled(enableCustomSettings);
|
||||
etInputShape.setEnabled(enableCustomSettings);
|
||||
etInputMean.setEnabled(enableCustomSettings);
|
||||
etInputStd.setEnabled(enableCustomSettings);
|
||||
etScoreThreshold.setEnabled(enableCustomSettings);
|
||||
modelPath = sharedPreferences.getString(getString(R.string.MODEL_PATH_KEY),
|
||||
getString(R.string.MODEL_PATH_DEFAULT));
|
||||
String labelPath = sharedPreferences.getString(getString(R.string.LABEL_PATH_KEY),
|
||||
getString(R.string.LABEL_PATH_DEFAULT));
|
||||
String imagePath = sharedPreferences.getString(getString(R.string.IMAGE_PATH_KEY),
|
||||
getString(R.string.IMAGE_PATH_DEFAULT));
|
||||
String cpuThreadNum = sharedPreferences.getString(getString(R.string.CPU_THREAD_NUM_KEY),
|
||||
getString(R.string.CPU_THREAD_NUM_DEFAULT));
|
||||
String cpuPowerMode = sharedPreferences.getString(getString(R.string.CPU_POWER_MODE_KEY),
|
||||
getString(R.string.CPU_POWER_MODE_DEFAULT));
|
||||
String inputColorFormat = sharedPreferences.getString(getString(R.string.INPUT_COLOR_FORMAT_KEY),
|
||||
getString(R.string.INPUT_COLOR_FORMAT_DEFAULT));
|
||||
String inputShape = sharedPreferences.getString(getString(R.string.INPUT_SHAPE_KEY),
|
||||
getString(R.string.INPUT_SHAPE_DEFAULT));
|
||||
String inputMean = sharedPreferences.getString(getString(R.string.INPUT_MEAN_KEY),
|
||||
getString(R.string.INPUT_MEAN_DEFAULT));
|
||||
String inputStd = sharedPreferences.getString(getString(R.string.INPUT_STD_KEY),
|
||||
getString(R.string.INPUT_STD_DEFAULT));
|
||||
String scoreThreshold = sharedPreferences.getString(getString(R.string.SCORE_THRESHOLD_KEY),
|
||||
getString(R.string.SCORE_THRESHOLD_DEFAULT));
|
||||
etModelPath.setSummary(modelPath);
|
||||
etModelPath.setText(modelPath);
|
||||
etLabelPath.setSummary(labelPath);
|
||||
etLabelPath.setText(labelPath);
|
||||
etImagePath.setSummary(imagePath);
|
||||
etImagePath.setText(imagePath);
|
||||
lpCPUThreadNum.setValue(cpuThreadNum);
|
||||
lpCPUThreadNum.setSummary(cpuThreadNum);
|
||||
lpCPUPowerMode.setValue(cpuPowerMode);
|
||||
lpCPUPowerMode.setSummary(cpuPowerMode);
|
||||
lpInputColorFormat.setValue(inputColorFormat);
|
||||
lpInputColorFormat.setSummary(inputColorFormat);
|
||||
etInputShape.setSummary(inputShape);
|
||||
etInputShape.setText(inputShape);
|
||||
etInputMean.setSummary(inputMean);
|
||||
etInputMean.setText(inputMean);
|
||||
etInputStd.setSummary(inputStd);
|
||||
etInputStd.setText(inputStd);
|
||||
etScoreThreshold.setText(scoreThreshold);
|
||||
etScoreThreshold.setSummary(scoreThreshold);
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onResume() {
|
||||
super.onResume();
|
||||
getPreferenceScreen().getSharedPreferences().registerOnSharedPreferenceChangeListener(this);
|
||||
reloadPreferenceAndUpdateUI();
|
||||
}
|
||||
|
||||
@Override
|
||||
protected void onPause() {
|
||||
super.onPause();
|
||||
getPreferenceScreen().getSharedPreferences().unregisterOnSharedPreferenceChangeListener(this);
|
||||
}
|
||||
|
||||
@Override
|
||||
public void onSharedPreferenceChanged(SharedPreferences sharedPreferences, String key) {
|
||||
if (key.equals(getString(R.string.CHOOSE_PRE_INSTALLED_MODEL_KEY))) {
|
||||
SharedPreferences.Editor editor = sharedPreferences.edit();
|
||||
editor.putBoolean(getString(R.string.ENABLE_CUSTOM_SETTINGS_KEY), false);
|
||||
editor.commit();
|
||||
}
|
||||
reloadPreferenceAndUpdateUI();
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,159 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import android.content.Context;
|
||||
import android.graphics.Bitmap;
|
||||
import android.graphics.Matrix;
|
||||
import android.media.ExifInterface;
|
||||
import android.os.Environment;
|
||||
|
||||
import java.io.*;
|
||||
|
||||
public class Utils {
|
||||
private static final String TAG = Utils.class.getSimpleName();
|
||||
|
||||
public static void copyFileFromAssets(Context appCtx, String srcPath, String dstPath) {
|
||||
if (srcPath.isEmpty() || dstPath.isEmpty()) {
|
||||
return;
|
||||
}
|
||||
InputStream is = null;
|
||||
OutputStream os = null;
|
||||
try {
|
||||
is = new BufferedInputStream(appCtx.getAssets().open(srcPath));
|
||||
os = new BufferedOutputStream(new FileOutputStream(new File(dstPath)));
|
||||
byte[] buffer = new byte[1024];
|
||||
int length = 0;
|
||||
while ((length = is.read(buffer)) != -1) {
|
||||
os.write(buffer, 0, length);
|
||||
}
|
||||
} catch (FileNotFoundException e) {
|
||||
e.printStackTrace();
|
||||
} catch (IOException e) {
|
||||
e.printStackTrace();
|
||||
} finally {
|
||||
try {
|
||||
os.close();
|
||||
is.close();
|
||||
} catch (IOException e) {
|
||||
e.printStackTrace();
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
public static void copyDirectoryFromAssets(Context appCtx, String srcDir, String dstDir) {
|
||||
if (srcDir.isEmpty() || dstDir.isEmpty()) {
|
||||
return;
|
||||
}
|
||||
try {
|
||||
if (!new File(dstDir).exists()) {
|
||||
new File(dstDir).mkdirs();
|
||||
}
|
||||
for (String fileName : appCtx.getAssets().list(srcDir)) {
|
||||
String srcSubPath = srcDir + File.separator + fileName;
|
||||
String dstSubPath = dstDir + File.separator + fileName;
|
||||
if (new File(srcSubPath).isDirectory()) {
|
||||
copyDirectoryFromAssets(appCtx, srcSubPath, dstSubPath);
|
||||
} else {
|
||||
copyFileFromAssets(appCtx, srcSubPath, dstSubPath);
|
||||
}
|
||||
}
|
||||
} catch (Exception e) {
|
||||
e.printStackTrace();
|
||||
}
|
||||
}
|
||||
|
||||
public static float[] parseFloatsFromString(String string, String delimiter) {
|
||||
String[] pieces = string.trim().toLowerCase().split(delimiter);
|
||||
float[] floats = new float[pieces.length];
|
||||
for (int i = 0; i < pieces.length; i++) {
|
||||
floats[i] = Float.parseFloat(pieces[i].trim());
|
||||
}
|
||||
return floats;
|
||||
}
|
||||
|
||||
public static long[] parseLongsFromString(String string, String delimiter) {
|
||||
String[] pieces = string.trim().toLowerCase().split(delimiter);
|
||||
long[] longs = new long[pieces.length];
|
||||
for (int i = 0; i < pieces.length; i++) {
|
||||
longs[i] = Long.parseLong(pieces[i].trim());
|
||||
}
|
||||
return longs;
|
||||
}
|
||||
|
||||
public static String getSDCardDirectory() {
|
||||
return Environment.getExternalStorageDirectory().getAbsolutePath();
|
||||
}
|
||||
|
||||
public static boolean isSupportedNPU() {
|
||||
return false;
|
||||
// String hardware = android.os.Build.HARDWARE;
|
||||
// return hardware.equalsIgnoreCase("kirin810") || hardware.equalsIgnoreCase("kirin990");
|
||||
}
|
||||
|
||||
public static Bitmap resizeWithStep(Bitmap bitmap, int maxLength, int step) {
|
||||
int width = bitmap.getWidth();
|
||||
int height = bitmap.getHeight();
|
||||
int maxWH = Math.max(width, height);
|
||||
float ratio = 1;
|
||||
int newWidth = width;
|
||||
int newHeight = height;
|
||||
if (maxWH > maxLength) {
|
||||
ratio = maxLength * 1.0f / maxWH;
|
||||
newWidth = (int) Math.floor(ratio * width);
|
||||
newHeight = (int) Math.floor(ratio * height);
|
||||
}
|
||||
|
||||
newWidth = newWidth - newWidth % step;
|
||||
if (newWidth == 0) {
|
||||
newWidth = step;
|
||||
}
|
||||
newHeight = newHeight - newHeight % step;
|
||||
if (newHeight == 0) {
|
||||
newHeight = step;
|
||||
}
|
||||
return Bitmap.createScaledBitmap(bitmap, newWidth, newHeight, true);
|
||||
}
|
||||
|
||||
public static Bitmap rotateBitmap(Bitmap bitmap, int orientation) {
|
||||
|
||||
Matrix matrix = new Matrix();
|
||||
switch (orientation) {
|
||||
case ExifInterface.ORIENTATION_NORMAL:
|
||||
return bitmap;
|
||||
case ExifInterface.ORIENTATION_FLIP_HORIZONTAL:
|
||||
matrix.setScale(-1, 1);
|
||||
break;
|
||||
case ExifInterface.ORIENTATION_ROTATE_180:
|
||||
matrix.setRotate(180);
|
||||
break;
|
||||
case ExifInterface.ORIENTATION_FLIP_VERTICAL:
|
||||
matrix.setRotate(180);
|
||||
matrix.postScale(-1, 1);
|
||||
break;
|
||||
case ExifInterface.ORIENTATION_TRANSPOSE:
|
||||
matrix.setRotate(90);
|
||||
matrix.postScale(-1, 1);
|
||||
break;
|
||||
case ExifInterface.ORIENTATION_ROTATE_90:
|
||||
matrix.setRotate(90);
|
||||
break;
|
||||
case ExifInterface.ORIENTATION_TRANSVERSE:
|
||||
matrix.setRotate(-90);
|
||||
matrix.postScale(-1, 1);
|
||||
break;
|
||||
case ExifInterface.ORIENTATION_ROTATE_270:
|
||||
matrix.setRotate(-90);
|
||||
break;
|
||||
default:
|
||||
return bitmap;
|
||||
}
|
||||
try {
|
||||
Bitmap bmRotated = Bitmap.createBitmap(bitmap, 0, 0, bitmap.getWidth(), bitmap.getHeight(), matrix, true);
|
||||
bitmap.recycle();
|
||||
return bmRotated;
|
||||
}
|
||||
catch (OutOfMemoryError e) {
|
||||
e.printStackTrace();
|
||||
return null;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
<vector xmlns:android="http://schemas.android.com/apk/res/android"
|
||||
xmlns:aapt="http://schemas.android.com/aapt"
|
||||
android:width="108dp"
|
||||
android:height="108dp"
|
||||
android:viewportWidth="108"
|
||||
android:viewportHeight="108">
|
||||
<path
|
||||
android:fillType="evenOdd"
|
||||
android:pathData="M32,64C32,64 38.39,52.99 44.13,50.95C51.37,48.37 70.14,49.57 70.14,49.57L108.26,87.69L108,109.01L75.97,107.97L32,64Z"
|
||||
android:strokeWidth="1"
|
||||
android:strokeColor="#00000000">
|
||||
<aapt:attr name="android:fillColor">
|
||||
<gradient
|
||||
android:endX="78.5885"
|
||||
android:endY="90.9159"
|
||||
android:startX="48.7653"
|
||||
android:startY="61.0927"
|
||||
android:type="linear">
|
||||
<item
|
||||
android:color="#44000000"
|
||||
android:offset="0.0" />
|
||||
<item
|
||||
android:color="#00000000"
|
||||
android:offset="1.0" />
|
||||
</gradient>
|
||||
</aapt:attr>
|
||||
</path>
|
||||
<path
|
||||
android:fillColor="#FFFFFF"
|
||||
android:fillType="nonZero"
|
||||
android:pathData="M66.94,46.02L66.94,46.02C72.44,50.07 76,56.61 76,64L32,64C32,56.61 35.56,50.11 40.98,46.06L36.18,41.19C35.45,40.45 35.45,39.3 36.18,38.56C36.91,37.81 38.05,37.81 38.78,38.56L44.25,44.05C47.18,42.57 50.48,41.71 54,41.71C57.48,41.71 60.78,42.57 63.68,44.05L69.11,38.56C69.84,37.81 70.98,37.81 71.71,38.56C72.44,39.3 72.44,40.45 71.71,41.19L66.94,46.02ZM62.94,56.92C64.08,56.92 65,56.01 65,54.88C65,53.76 64.08,52.85 62.94,52.85C61.8,52.85 60.88,53.76 60.88,54.88C60.88,56.01 61.8,56.92 62.94,56.92ZM45.06,56.92C46.2,56.92 47.13,56.01 47.13,54.88C47.13,53.76 46.2,52.85 45.06,52.85C43.92,52.85 43,53.76 43,54.88C43,56.01 43.92,56.92 45.06,56.92Z"
|
||||
android:strokeWidth="1"
|
||||
android:strokeColor="#00000000" />
|
||||
</vector>
|
||||
|
|
@ -0,0 +1,170 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<vector xmlns:android="http://schemas.android.com/apk/res/android"
|
||||
android:width="108dp"
|
||||
android:height="108dp"
|
||||
android:viewportWidth="108"
|
||||
android:viewportHeight="108">
|
||||
<path
|
||||
android:fillColor="#008577"
|
||||
android:pathData="M0,0h108v108h-108z" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M9,0L9,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,0L19,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M29,0L29,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M39,0L39,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M49,0L49,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M59,0L59,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M69,0L69,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M79,0L79,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M89,0L89,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M99,0L99,108"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,9L108,9"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,19L108,19"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,29L108,29"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,39L108,39"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,49L108,49"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,59L108,59"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,69L108,69"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,79L108,79"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,89L108,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M0,99L108,99"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,29L89,29"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,39L89,39"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,49L89,49"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,59L89,59"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,69L89,69"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M19,79L89,79"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M29,19L29,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M39,19L39,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M49,19L49,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M59,19L59,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M69,19L69,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
<path
|
||||
android:fillColor="#00000000"
|
||||
android:pathData="M79,19L79,89"
|
||||
android:strokeWidth="0.8"
|
||||
android:strokeColor="#33FFFFFF" />
|
||||
</vector>
|
||||
|
|
@ -0,0 +1,99 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<androidx.constraintlayout.widget.ConstraintLayout xmlns:android="http://schemas.android.com/apk/res/android"
|
||||
xmlns:app="http://schemas.android.com/apk/res-auto"
|
||||
xmlns:tools="http://schemas.android.com/tools"
|
||||
android:layout_width="match_parent"
|
||||
android:layout_height="match_parent"
|
||||
tools:context=".MainActivity">
|
||||
|
||||
<RelativeLayout
|
||||
android:layout_width="match_parent"
|
||||
android:layout_height="match_parent">
|
||||
|
||||
<LinearLayout
|
||||
android:id="@+id/v_input_info"
|
||||
android:layout_width="fill_parent"
|
||||
android:layout_height="wrap_content"
|
||||
android:layout_alignParentTop="true"
|
||||
android:orientation="vertical">
|
||||
<TextView
|
||||
android:id="@+id/tv_input_setting"
|
||||
android:layout_width="wrap_content"
|
||||
android:layout_height="wrap_content"
|
||||
android:scrollbars="vertical"
|
||||
android:layout_marginLeft="12dp"
|
||||
android:layout_marginRight="12dp"
|
||||
android:layout_marginTop="10dp"
|
||||
android:layout_marginBottom="5dp"
|
||||
android:lineSpacingExtra="4dp"
|
||||
android:singleLine="false"
|
||||
android:maxLines="6"
|
||||
android:text=""/>
|
||||
|
||||
</LinearLayout>
|
||||
|
||||
<RelativeLayout
|
||||
android:layout_width="match_parent"
|
||||
android:layout_height="match_parent"
|
||||
android:layout_above="@+id/v_output_info"
|
||||
android:layout_below="@+id/v_input_info">
|
||||
|
||||
<ImageView
|
||||
android:id="@+id/iv_input_image"
|
||||
android:layout_width="400dp"
|
||||
android:layout_height="400dp"
|
||||
android:layout_centerHorizontal="true"
|
||||
android:layout_centerVertical="true"
|
||||
android:layout_marginLeft="12dp"
|
||||
android:layout_marginRight="12dp"
|
||||
android:layout_marginTop="5dp"
|
||||
android:layout_marginBottom="5dp"
|
||||
android:adjustViewBounds="true"
|
||||
android:scaleType="fitCenter"/>
|
||||
</RelativeLayout>
|
||||
|
||||
|
||||
<RelativeLayout
|
||||
android:id="@+id/v_output_info"
|
||||
android:layout_width="wrap_content"
|
||||
android:layout_height="wrap_content"
|
||||
android:layout_alignParentBottom="true"
|
||||
android:layout_centerHorizontal="true">
|
||||
|
||||
<TextView
|
||||
android:id="@+id/tv_output_result"
|
||||
android:layout_width="wrap_content"
|
||||
android:layout_height="wrap_content"
|
||||
android:layout_alignParentTop="true"
|
||||
android:layout_centerHorizontal="true"
|
||||
android:layout_centerVertical="true"
|
||||
android:scrollbars="vertical"
|
||||
android:layout_marginLeft="12dp"
|
||||
android:layout_marginRight="12dp"
|
||||
android:layout_marginTop="5dp"
|
||||
android:layout_marginBottom="5dp"
|
||||
android:textAlignment="center"
|
||||
android:lineSpacingExtra="5dp"
|
||||
android:singleLine="false"
|
||||
android:maxLines="5"
|
||||
android:text=""/>
|
||||
|
||||
<TextView
|
||||
android:id="@+id/tv_inference_time"
|
||||
android:layout_width="wrap_content"
|
||||
android:layout_height="wrap_content"
|
||||
android:layout_below="@+id/tv_output_result"
|
||||
android:layout_centerHorizontal="true"
|
||||
android:layout_centerVertical="true"
|
||||
android:textAlignment="center"
|
||||
android:layout_marginLeft="12dp"
|
||||
android:layout_marginRight="12dp"
|
||||
android:layout_marginTop="5dp"
|
||||
android:layout_marginBottom="10dp"
|
||||
android:text=""/>
|
||||
|
||||
</RelativeLayout>
|
||||
|
||||
</RelativeLayout>
|
||||
|
||||
</androidx.constraintlayout.widget.ConstraintLayout>
|
||||
|
|
@ -0,0 +1,46 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<!-- for MiniActivity Use Only -->
|
||||
<androidx.constraintlayout.widget.ConstraintLayout xmlns:android="http://schemas.android.com/apk/res/android"
|
||||
xmlns:app="http://schemas.android.com/apk/res-auto"
|
||||
xmlns:tools="http://schemas.android.com/tools"
|
||||
android:layout_width="match_parent"
|
||||
android:layout_height="match_parent"
|
||||
app:layout_constraintLeft_toLeftOf="parent"
|
||||
app:layout_constraintLeft_toRightOf="parent"
|
||||
tools:context=".MainActivity">
|
||||
|
||||
<TextView
|
||||
android:id="@+id/sample_text"
|
||||
android:layout_width="0dp"
|
||||
android:layout_height="wrap_content"
|
||||
android:text="Hello World!"
|
||||
app:layout_constraintLeft_toLeftOf="parent"
|
||||
app:layout_constraintRight_toRightOf="parent"
|
||||
app:layout_constraintTop_toBottomOf="@id/imageView"
|
||||
android:scrollbars="vertical"
|
||||
/>
|
||||
|
||||
<ImageView
|
||||
android:id="@+id/imageView"
|
||||
android:layout_width="wrap_content"
|
||||
android:layout_height="wrap_content"
|
||||
android:paddingTop="20dp"
|
||||
android:paddingBottom="20dp"
|
||||
app:layout_constraintBottom_toTopOf="@id/imageView"
|
||||
app:layout_constraintLeft_toLeftOf="parent"
|
||||
app:layout_constraintRight_toRightOf="parent"
|
||||
app:layout_constraintTop_toTopOf="parent"
|
||||
tools:srcCompat="@tools:sample/avatars" />
|
||||
|
||||
<Button
|
||||
android:id="@+id/button"
|
||||
android:layout_width="wrap_content"
|
||||
android:layout_height="wrap_content"
|
||||
android:layout_marginBottom="4dp"
|
||||
android:text="Button"
|
||||
app:layout_constraintBottom_toBottomOf="parent"
|
||||
app:layout_constraintLeft_toLeftOf="parent"
|
||||
app:layout_constraintRight_toRightOf="parent"
|
||||
tools:layout_editor_absoluteX="161dp" />
|
||||
|
||||
</androidx.constraintlayout.widget.ConstraintLayout>
|
||||
|
|
@ -0,0 +1,21 @@
|
|||
<menu xmlns:android="http://schemas.android.com/apk/res/android"
|
||||
xmlns:app="http://schemas.android.com/apk/res-auto">
|
||||
<group android:id="@+id/pick_image">
|
||||
<item
|
||||
android:id="@+id/open_gallery"
|
||||
android:title="Open Gallery"
|
||||
app:showAsAction="withText"/>
|
||||
|
||||
<item
|
||||
android:id="@+id/take_photo"
|
||||
android:title="Take Photo"
|
||||
app:showAsAction="withText"/>
|
||||
</group>
|
||||
|
||||
<group>
|
||||
<item
|
||||
android:id="@+id/settings"
|
||||
android:title="Settings..."
|
||||
app:showAsAction="withText"/>
|
||||
</group>
|
||||
</menu>
|
||||
|
|
@ -0,0 +1,5 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<adaptive-icon xmlns:android="http://schemas.android.com/apk/res/android">
|
||||
<background android:drawable="@drawable/ic_launcher_background" />
|
||||
<foreground android:drawable="@drawable/ic_launcher_foreground" />
|
||||
</adaptive-icon>
|
||||
|
|
@ -0,0 +1,5 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<adaptive-icon xmlns:android="http://schemas.android.com/apk/res/android">
|
||||
<background android:drawable="@drawable/ic_launcher_background" />
|
||||
<foreground android:drawable="@drawable/ic_launcher_foreground" />
|
||||
</adaptive-icon>
|
||||
{kind=link}
|
After Width: | Height: | Size: 2.9 KiB |
{kind=link}
|
After Width: | Height: | Size: 4.8 KiB |
{kind=link}
|
After Width: | Height: | Size: 2.0 KiB |
{kind=link}
|
After Width: | Height: | Size: 2.7 KiB |
{kind=link}
|
After Width: | Height: | Size: 4.4 KiB |
{kind=link}
|
After Width: | Height: | Size: 6.7 KiB |
{kind=link}
|
After Width: | Height: | Size: 6.2 KiB |
{kind=link}
|
After Width: | Height: | Size: 10 KiB |
{kind=link}
|
After Width: | Height: | Size: 8.9 KiB |
{kind=link}
|
After Width: | Height: | Size: 15 KiB |
|
|
@ -0,0 +1,39 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<resources>
|
||||
<string-array name="cpu_thread_num_entries">
|
||||
<item>1 threads</item>
|
||||
<item>2 threads</item>
|
||||
<item>4 threads</item>
|
||||
<item>8 threads</item>
|
||||
</string-array>
|
||||
<string-array name="cpu_thread_num_values">
|
||||
<item>1</item>
|
||||
<item>2</item>
|
||||
<item>4</item>
|
||||
<item>8</item>
|
||||
</string-array>
|
||||
<string-array name="cpu_power_mode_entries">
|
||||
<item>HIGH(only big cores)</item>
|
||||
<item>LOW(only LITTLE cores)</item>
|
||||
<item>FULL(all cores)</item>
|
||||
<item>NO_BIND(depends on system)</item>
|
||||
<item>RAND_HIGH</item>
|
||||
<item>RAND_LOW</item>
|
||||
</string-array>
|
||||
<string-array name="cpu_power_mode_values">
|
||||
<item>LITE_POWER_HIGH</item>
|
||||
<item>LITE_POWER_LOW</item>
|
||||
<item>LITE_POWER_FULL</item>
|
||||
<item>LITE_POWER_NO_BIND</item>
|
||||
<item>LITE_POWER_RAND_HIGH</item>
|
||||
<item>LITE_POWER_RAND_LOW</item>
|
||||
</string-array>
|
||||
<string-array name="input_color_format_entries">
|
||||
<item>BGR color format</item>
|
||||
<item>RGB color format</item>
|
||||
</string-array>
|
||||
<string-array name="input_color_format_values">
|
||||
<item>BGR</item>
|
||||
<item>RGB</item>
|
||||
</string-array>
|
||||
</resources>
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<resources>
|
||||
<color name="colorPrimary">#008577</color>
|
||||
<color name="colorPrimaryDark">#00574B</color>
|
||||
<color name="colorAccent">#D81B60</color>
|
||||
</resources>
|
||||
|
|
@ -0,0 +1,26 @@
|
|||
<resources>
|
||||
<string name="app_name">OCR Chinese</string>
|
||||
<string name="CHOOSE_PRE_INSTALLED_MODEL_KEY">CHOOSE_PRE_INSTALLED_MODEL_KEY</string>
|
||||
<string name="ENABLE_CUSTOM_SETTINGS_KEY">ENABLE_CUSTOM_SETTINGS_KEY</string>
|
||||
<string name="MODEL_PATH_KEY">MODEL_PATH_KEY</string>
|
||||
<string name="LABEL_PATH_KEY">LABEL_PATH_KEY</string>
|
||||
<string name="IMAGE_PATH_KEY">IMAGE_PATH_KEY</string>
|
||||
<string name="CPU_THREAD_NUM_KEY">CPU_THREAD_NUM_KEY</string>
|
||||
<string name="CPU_POWER_MODE_KEY">CPU_POWER_MODE_KEY</string>
|
||||
<string name="INPUT_COLOR_FORMAT_KEY">INPUT_COLOR_FORMAT_KEY</string>
|
||||
<string name="INPUT_SHAPE_KEY">INPUT_SHAPE_KEY</string>
|
||||
<string name="INPUT_MEAN_KEY">INPUT_MEAN_KEY</string>
|
||||
<string name="INPUT_STD_KEY">INPUT_STD_KEY</string>
|
||||
<string name="SCORE_THRESHOLD_KEY">SCORE_THRESHOLD_KEY</string>
|
||||
<string name="MODEL_PATH_DEFAULT">models/ocr_v1_for_cpu</string>
|
||||
<string name="LABEL_PATH_DEFAULT">labels/ppocr_keys_v1.txt</string>
|
||||
<string name="IMAGE_PATH_DEFAULT">images/5.jpg</string>
|
||||
<string name="CPU_THREAD_NUM_DEFAULT">4</string>
|
||||
<string name="CPU_POWER_MODE_DEFAULT">LITE_POWER_HIGH</string>
|
||||
<string name="INPUT_COLOR_FORMAT_DEFAULT">BGR</string>
|
||||
<string name="INPUT_SHAPE_DEFAULT">1,3,960</string>
|
||||
<string name="INPUT_MEAN_DEFAULT">0.485, 0.456, 0.406</string>
|
||||
<string name="INPUT_STD_DEFAULT">0.229,0.224,0.225</string>
|
||||
<string name="SCORE_THRESHOLD_DEFAULT">0.1</string>
|
||||
</resources>
|
||||
|
||||
|
|
@ -0,0 +1,25 @@
|
|||
<resources>
|
||||
|
||||
<!-- Base application theme. -->
|
||||
<style name="AppTheme" parent="Theme.AppCompat.Light.DarkActionBar">
|
||||
<!-- Customize your theme here. -->
|
||||
<item name="colorPrimary">@color/colorPrimary</item>
|
||||
<item name="colorPrimaryDark">@color/colorPrimaryDark</item>
|
||||
<item name="colorAccent">@color/colorAccent</item>
|
||||
<item name="actionOverflowMenuStyle">@style/OverflowMenuStyle</item>
|
||||
</style>
|
||||
|
||||
<style name="OverflowMenuStyle" parent="Widget.AppCompat.Light.PopupMenu.Overflow">
|
||||
<item name="overlapAnchor">false</item>
|
||||
</style>
|
||||
|
||||
<style name="AppTheme.NoActionBar">
|
||||
<item name="windowActionBar">false</item>
|
||||
<item name="windowNoTitle">true</item>
|
||||
</style>
|
||||
|
||||
<style name="AppTheme.AppBarOverlay" parent="ThemeOverlay.AppCompat.Dark.ActionBar"/>
|
||||
|
||||
<style name="AppTheme.PopupOverlay" parent="ThemeOverlay.AppCompat.Light"/>
|
||||
|
||||
</resources>
|
||||
|
|
@ -0,0 +1,4 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<paths xmlns:android="http://schemas.android.com/apk/res/android">
|
||||
<external-files-path name="my_images" path="Pictures" />
|
||||
</paths>
|
||||
|
|
@ -0,0 +1,75 @@
|
|||
<?xml version="1.0" encoding="utf-8"?>
|
||||
<PreferenceScreen xmlns:android="http://schemas.android.com/apk/res/android" >
|
||||
<PreferenceCategory android:title="Model Settings">
|
||||
<ListPreference
|
||||
android:defaultValue="@string/MODEL_PATH_DEFAULT"
|
||||
android:key="@string/CHOOSE_PRE_INSTALLED_MODEL_KEY"
|
||||
android:negativeButtonText="@null"
|
||||
android:positiveButtonText="@null"
|
||||
android:title="Choose pre-installed models" />
|
||||
<CheckBoxPreference
|
||||
android:defaultValue="false"
|
||||
android:key="@string/ENABLE_CUSTOM_SETTINGS_KEY"
|
||||
android:summaryOn="Enable"
|
||||
android:summaryOff="Disable"
|
||||
android:title="Enable custom settings"/>
|
||||
<EditTextPreference
|
||||
android:key="@string/MODEL_PATH_KEY"
|
||||
android:defaultValue="@string/MODEL_PATH_DEFAULT"
|
||||
android:title="Model Path" />
|
||||
<EditTextPreference
|
||||
android:key="@string/LABEL_PATH_KEY"
|
||||
android:defaultValue="@string/LABEL_PATH_DEFAULT"
|
||||
android:title="Label Path" />
|
||||
<EditTextPreference
|
||||
android:key="@string/IMAGE_PATH_KEY"
|
||||
android:defaultValue="@string/IMAGE_PATH_DEFAULT"
|
||||
android:title="Image Path" />
|
||||
</PreferenceCategory>
|
||||
<PreferenceCategory android:title="CPU Settings">
|
||||
<ListPreference
|
||||
android:defaultValue="@string/CPU_THREAD_NUM_DEFAULT"
|
||||
android:key="@string/CPU_THREAD_NUM_KEY"
|
||||
android:negativeButtonText="@null"
|
||||
android:positiveButtonText="@null"
|
||||
android:title="CPU Thread Num"
|
||||
android:entries="@array/cpu_thread_num_entries"
|
||||
android:entryValues="@array/cpu_thread_num_values"/>
|
||||
<ListPreference
|
||||
android:defaultValue="@string/CPU_POWER_MODE_DEFAULT"
|
||||
android:key="@string/CPU_POWER_MODE_KEY"
|
||||
android:negativeButtonText="@null"
|
||||
android:positiveButtonText="@null"
|
||||
android:title="CPU Power Mode"
|
||||
android:entries="@array/cpu_power_mode_entries"
|
||||
android:entryValues="@array/cpu_power_mode_values"/>
|
||||
</PreferenceCategory>
|
||||
<PreferenceCategory android:title="Input Settings">
|
||||
<ListPreference
|
||||
android:defaultValue="@string/INPUT_COLOR_FORMAT_DEFAULT"
|
||||
android:key="@string/INPUT_COLOR_FORMAT_KEY"
|
||||
android:negativeButtonText="@null"
|
||||
android:positiveButtonText="@null"
|
||||
android:title="Input Color Format: BGR or RGB"
|
||||
android:entries="@array/input_color_format_entries"
|
||||
android:entryValues="@array/input_color_format_values"/>
|
||||
<EditTextPreference
|
||||
android:key="@string/INPUT_SHAPE_KEY"
|
||||
android:defaultValue="@string/INPUT_SHAPE_DEFAULT"
|
||||
android:title="Input Shape: (1,1,max_width_height) or (1,3,max_width_height)" />
|
||||
<EditTextPreference
|
||||
android:key="@string/INPUT_MEAN_KEY"
|
||||
android:defaultValue="@string/INPUT_MEAN_DEFAULT"
|
||||
android:title="Input Mean: (channel/255-mean)/std" />
|
||||
<EditTextPreference
|
||||
android:key="@string/INPUT_STD_KEY"
|
||||
android:defaultValue="@string/INPUT_STD_DEFAULT"
|
||||
android:title="Input Std: (channel/255-mean)/std" />
|
||||
</PreferenceCategory>
|
||||
<PreferenceCategory android:title="Output Settings">
|
||||
<EditTextPreference
|
||||
android:key="@string/SCORE_THRESHOLD_KEY"
|
||||
android:defaultValue="@string/SCORE_THRESHOLD_DEFAULT"
|
||||
android:title="Score Threshold" />
|
||||
</PreferenceCategory>
|
||||
</PreferenceScreen>
|
||||
|
|
@ -0,0 +1,17 @@
|
|||
package com.baidu.paddle.lite.demo.ocr;
|
||||
|
||||
import org.junit.Test;
|
||||
|
||||
import static org.junit.Assert.*;
|
||||
|
||||
/**
|
||||
* Example local unit test, which will execute on the development machine (host).
|
||||
*
|
||||
* @see <a href="http://d.android.com/tools/testing">Testing documentation</a>
|
||||
*/
|
||||
public class ExampleUnitTest {
|
||||
@Test
|
||||
public void addition_isCorrect() {
|
||||
assertEquals(4, 2 + 2);
|
||||
}
|
||||
}
|
||||
|
|
@ -0,0 +1,27 @@
|
|||
// Top-level build file where you can add configuration options common to all sub-projects/modules.
|
||||
|
||||
buildscript {
|
||||
repositories {
|
||||
google()
|
||||
jcenter()
|
||||
|
||||
}
|
||||
dependencies {
|
||||
classpath 'com.android.tools.build:gradle:3.4.0'
|
||||
|
||||
// NOTE: Do not place your application dependencies here; they belong
|
||||
// in the individual module build.gradle files
|
||||
}
|
||||
}
|
||||
|
||||
allprojects {
|
||||
repositories {
|
||||
google()
|
||||
jcenter()
|
||||
|
||||
}
|
||||
}
|
||||
|
||||
task clean(type: Delete) {
|
||||
delete rootProject.buildDir
|
||||
}
|
||||
|
|
@ -0,0 +1,15 @@
|
|||
# Project-wide Gradle settings.
|
||||
# IDE (e.g. Android Studio) users:
|
||||
# Gradle settings configured through the IDE *will override*
|
||||
# any settings specified in this file.
|
||||
# For more details on how to configure your build environment visit
|
||||
# http://www.gradle.org/docs/current/userguide/build_environment.html
|
||||
# Specifies the JVM arguments used for the daemon process.
|
||||
# The setting is particularly useful for tweaking memory settings.
|
||||
org.gradle.jvmargs=-Xmx1536m
|
||||
# When configured, Gradle will run in incubating parallel mode.
|
||||
# This option should only be used with decoupled projects. More details, visit
|
||||
# http://www.gradle.org/docs/current/userguide/multi_project_builds.html#sec:decoupled_projects
|
||||
# org.gradle.parallel=true
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
#Thu Aug 22 15:05:37 CST 2019
|
||||
distributionBase=GRADLE_USER_HOME
|
||||
distributionPath=wrapper/dists
|
||||
zipStoreBase=GRADLE_USER_HOME
|
||||
zipStorePath=wrapper/dists
|
||||
distributionUrl=https\://services.gradle.org/distributions/gradle-5.1.1-all.zip
|
||||
|
|
@ -0,0 +1,172 @@
|
|||
#!/usr/bin/env sh
|
||||
|
||||
##############################################################################
|
||||
##
|
||||
## Gradle start up script for UN*X
|
||||
##
|
||||
##############################################################################
|
||||
|
||||
# Attempt to set APP_HOME
|
||||
# Resolve links: $0 may be a link
|
||||
PRG="$0"
|
||||
# Need this for relative symlinks.
|
||||
while [ -h "$PRG" ] ; do
|
||||
ls=`ls -ld "$PRG"`
|
||||
link=`expr "$ls" : '.*-> \(.*\)$'`
|
||||
if expr "$link" : '/.*' > /dev/null; then
|
||||
PRG="$link"
|
||||
else
|
||||
PRG=`dirname "$PRG"`"/$link"
|
||||
fi
|
||||
done
|
||||
SAVED="`pwd`"
|
||||
cd "`dirname \"$PRG\"`/" >/dev/null
|
||||
APP_HOME="`pwd -P`"
|
||||
cd "$SAVED" >/dev/null
|
||||
|
||||
APP_NAME="Gradle"
|
||||
APP_BASE_NAME=`basename "$0"`
|
||||
|
||||
# Add default JVM options here. You can also use JAVA_OPTS and GRADLE_OPTS to pass JVM options to this script.
|
||||
DEFAULT_JVM_OPTS=""
|
||||
|
||||
# Use the maximum available, or set MAX_FD != -1 to use that value.
|
||||
MAX_FD="maximum"
|
||||
|
||||
warn () {
|
||||
echo "$*"
|
||||
}
|
||||
|
||||
die () {
|
||||
echo
|
||||
echo "$*"
|
||||
echo
|
||||
exit 1
|
||||
}
|
||||
|
||||
# OS specific support (must be 'true' or 'false').
|
||||
cygwin=false
|
||||
msys=false
|
||||
darwin=false
|
||||
nonstop=false
|
||||
case "`uname`" in
|
||||
CYGWIN* )
|
||||
cygwin=true
|
||||
;;
|
||||
Darwin* )
|
||||
darwin=true
|
||||
;;
|
||||
MINGW* )
|
||||
msys=true
|
||||
;;
|
||||
NONSTOP* )
|
||||
nonstop=true
|
||||
;;
|
||||
esac
|
||||
|
||||
CLASSPATH=$APP_HOME/gradle/wrapper/gradle-wrapper.jar
|
||||
|
||||
# Determine the Java command to use to start the JVM.
|
||||
if [ -n "$JAVA_HOME" ] ; then
|
||||
if [ -x "$JAVA_HOME/jre/sh/java" ] ; then
|
||||
# IBM's JDK on AIX uses strange locations for the executables
|
||||
JAVACMD="$JAVA_HOME/jre/sh/java"
|
||||
else
|
||||
JAVACMD="$JAVA_HOME/bin/java"
|
||||
fi
|
||||
if [ ! -x "$JAVACMD" ] ; then
|
||||
die "ERROR: JAVA_HOME is set to an invalid directory: $JAVA_HOME
|
||||
|
||||
Please set the JAVA_HOME variable in your environment to match the
|
||||
location of your Java installation."
|
||||
fi
|
||||
else
|
||||
JAVACMD="java"
|
||||
which java >/dev/null 2>&1 || die "ERROR: JAVA_HOME is not set and no 'java' command could be found in your PATH.
|
||||
|
||||
Please set the JAVA_HOME variable in your environment to match the
|
||||
location of your Java installation."
|
||||
fi
|
||||
|
||||
# Increase the maximum file descriptors if we can.
|
||||
if [ "$cygwin" = "false" -a "$darwin" = "false" -a "$nonstop" = "false" ] ; then
|
||||
MAX_FD_LIMIT=`ulimit -H -n`
|
||||
if [ $? -eq 0 ] ; then
|
||||
if [ "$MAX_FD" = "maximum" -o "$MAX_FD" = "max" ] ; then
|
||||
MAX_FD="$MAX_FD_LIMIT"
|
||||
fi
|
||||
ulimit -n $MAX_FD
|
||||
if [ $? -ne 0 ] ; then
|
||||
warn "Could not set maximum file descriptor limit: $MAX_FD"
|
||||
fi
|
||||
else
|
||||
warn "Could not query maximum file descriptor limit: $MAX_FD_LIMIT"
|
||||
fi
|
||||
fi
|
||||
|
||||
# For Darwin, add options to specify how the application appears in the dock
|
||||
if $darwin; then
|
||||
GRADLE_OPTS="$GRADLE_OPTS \"-Xdock:name=$APP_NAME\" \"-Xdock:icon=$APP_HOME/media/gradle.icns\""
|
||||
fi
|
||||
|
||||
# For Cygwin, switch paths to Windows format before running java
|
||||
if $cygwin ; then
|
||||
APP_HOME=`cygpath --path --mixed "$APP_HOME"`
|
||||
CLASSPATH=`cygpath --path --mixed "$CLASSPATH"`
|
||||
JAVACMD=`cygpath --unix "$JAVACMD"`
|
||||
|
||||
# We build the pattern for arguments to be converted via cygpath
|
||||
ROOTDIRSRAW=`find -L / -maxdepth 1 -mindepth 1 -type d 2>/dev/null`
|
||||
SEP=""
|
||||
for dir in $ROOTDIRSRAW ; do
|
||||
ROOTDIRS="$ROOTDIRS$SEP$dir"
|
||||
SEP="|"
|
||||
done
|
||||
OURCYGPATTERN="(^($ROOTDIRS))"
|
||||
# Add a user-defined pattern to the cygpath arguments
|
||||
if [ "$GRADLE_CYGPATTERN" != "" ] ; then
|
||||
OURCYGPATTERN="$OURCYGPATTERN|($GRADLE_CYGPATTERN)"
|
||||
fi
|
||||
# Now convert the arguments - kludge to limit ourselves to /bin/sh
|
||||
i=0
|
||||
for arg in "$@" ; do
|
||||
CHECK=`echo "$arg"|egrep -c "$OURCYGPATTERN" -`
|
||||
CHECK2=`echo "$arg"|egrep -c "^-"` ### Determine if an option
|
||||
|
||||
if [ $CHECK -ne 0 ] && [ $CHECK2 -eq 0 ] ; then ### Added a condition
|
||||
eval `echo args$i`=`cygpath --path --ignore --mixed "$arg"`
|
||||
else
|
||||
eval `echo args$i`="\"$arg\""
|
||||
fi
|
||||
i=$((i+1))
|
||||
done
|
||||
case $i in
|
||||
(0) set -- ;;
|
||||
(1) set -- "$args0" ;;
|
||||
(2) set -- "$args0" "$args1" ;;
|
||||
(3) set -- "$args0" "$args1" "$args2" ;;
|
||||
(4) set -- "$args0" "$args1" "$args2" "$args3" ;;
|
||||
(5) set -- "$args0" "$args1" "$args2" "$args3" "$args4" ;;
|
||||
(6) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" ;;
|
||||
(7) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" "$args6" ;;
|
||||
(8) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" "$args6" "$args7" ;;
|
||||
(9) set -- "$args0" "$args1" "$args2" "$args3" "$args4" "$args5" "$args6" "$args7" "$args8" ;;
|
||||
esac
|
||||
fi
|
||||
|
||||
# Escape application args
|
||||
save () {
|
||||
for i do printf %s\\n "$i" | sed "s/'/'\\\\''/g;1s/^/'/;\$s/\$/' \\\\/" ; done
|
||||
echo " "
|
||||
}
|
||||
APP_ARGS=$(save "$@")
|
||||
|
||||
# Collect all arguments for the java command, following the shell quoting and substitution rules
|
||||
eval set -- $DEFAULT_JVM_OPTS $JAVA_OPTS $GRADLE_OPTS "\"-Dorg.gradle.appname=$APP_BASE_NAME\"" -classpath "\"$CLASSPATH\"" org.gradle.wrapper.GradleWrapperMain "$APP_ARGS"
|
||||
|
||||
# by default we should be in the correct project dir, but when run from Finder on Mac, the cwd is wrong
|
||||
if [ "$(uname)" = "Darwin" ] && [ "$HOME" = "$PWD" ]; then
|
||||
cd "$(dirname "$0")"
|
||||
fi
|
||||
|
||||
exec "$JAVACMD" "$@"
|
||||
|
|
@ -0,0 +1,84 @@
|
|||
@if "%DEBUG%" == "" @echo off
|
||||
@rem ##########################################################################
|
||||
@rem
|
||||
@rem Gradle startup script for Windows
|
||||
@rem
|
||||
@rem ##########################################################################
|
||||
|
||||
@rem Set local scope for the variables with windows NT shell
|
||||
if "%OS%"=="Windows_NT" setlocal
|
||||
|
||||
set DIRNAME=%~dp0
|
||||
if "%DIRNAME%" == "" set DIRNAME=.
|
||||
set APP_BASE_NAME=%~n0
|
||||
set APP_HOME=%DIRNAME%
|
||||
|
||||
@rem Add default JVM options here. You can also use JAVA_OPTS and GRADLE_OPTS to pass JVM options to this script.
|
||||
set DEFAULT_JVM_OPTS=
|
||||
|
||||
@rem Find java.exe
|
||||
if defined JAVA_HOME goto findJavaFromJavaHome
|
||||
|
||||
set JAVA_EXE=java.exe
|
||||
%JAVA_EXE% -version >NUL 2>&1
|
||||
if "%ERRORLEVEL%" == "0" goto init
|
||||
|
||||
echo.
|
||||
echo ERROR: JAVA_HOME is not set and no 'java' command could be found in your PATH.
|
||||
echo.
|
||||
echo Please set the JAVA_HOME variable in your environment to match the
|
||||
echo location of your Java installation.
|
||||
|
||||
goto fail
|
||||
|
||||
:findJavaFromJavaHome
|
||||
set JAVA_HOME=%JAVA_HOME:"=%
|
||||
set JAVA_EXE=%JAVA_HOME%/bin/java.exe
|
||||
|
||||
if exist "%JAVA_EXE%" goto init
|
||||
|
||||
echo.
|
||||
echo ERROR: JAVA_HOME is set to an invalid directory: %JAVA_HOME%
|
||||
echo.
|
||||
echo Please set the JAVA_HOME variable in your environment to match the
|
||||
echo location of your Java installation.
|
||||
|
||||
goto fail
|
||||
|
||||
:init
|
||||
@rem Get command-line arguments, handling Windows variants
|
||||
|
||||
if not "%OS%" == "Windows_NT" goto win9xME_args
|
||||
|
||||
:win9xME_args
|
||||
@rem Slurp the command line arguments.
|
||||
set CMD_LINE_ARGS=
|
||||
set _SKIP=2
|
||||
|
||||
:win9xME_args_slurp
|
||||
if "x%~1" == "x" goto execute
|
||||
|
||||
set CMD_LINE_ARGS=%*
|
||||
|
||||
:execute
|
||||
@rem Setup the command line
|
||||
|
||||
set CLASSPATH=%APP_HOME%\gradle\wrapper\gradle-wrapper.jar
|
||||
|
||||
@rem Execute Gradle
|
||||
"%JAVA_EXE%" %DEFAULT_JVM_OPTS% %JAVA_OPTS% %GRADLE_OPTS% "-Dorg.gradle.appname=%APP_BASE_NAME%" -classpath "%CLASSPATH%" org.gradle.wrapper.GradleWrapperMain %CMD_LINE_ARGS%
|
||||
|
||||
:end
|
||||
@rem End local scope for the variables with windows NT shell
|
||||
if "%ERRORLEVEL%"=="0" goto mainEnd
|
||||
|
||||
:fail
|
||||
rem Set variable GRADLE_EXIT_CONSOLE if you need the _script_ return code instead of
|
||||
rem the _cmd.exe /c_ return code!
|
||||
if not "" == "%GRADLE_EXIT_CONSOLE%" exit 1
|
||||
exit /b 1
|
||||
|
||||
:mainEnd
|
||||
if "%OS%"=="Windows_NT" endlocal
|
||||
|
||||
:omega
|
||||
|
|
@ -0,0 +1 @@
|
|||
include ':app'
|
||||
|
|
@ -0,0 +1,201 @@
|
|||
project(ocr_system CXX C)
|
||||
|
||||
option(WITH_MKL "Compile demo with MKL/OpenBlas support, default use MKL." ON)
|
||||
option(WITH_GPU "Compile demo with GPU/CPU, default use CPU." OFF)
|
||||
option(WITH_STATIC_LIB "Compile demo with static/shared library, default use static." ON)
|
||||
option(WITH_TENSORRT "Compile demo with TensorRT." OFF)
|
||||
|
||||
SET(PADDLE_LIB "" CACHE PATH "Location of libraries")
|
||||
SET(OPENCV_DIR "" CACHE PATH "Location of libraries")
|
||||
SET(CUDA_LIB "" CACHE PATH "Location of libraries")
|
||||
SET(CUDNN_LIB "" CACHE PATH "Location of libraries")
|
||||
SET(TENSORRT_DIR "" CACHE PATH "Compile demo with TensorRT")
|
||||
|
||||
set(DEMO_NAME "ocr_system")
|
||||
|
||||
|
||||
macro(safe_set_static_flag)
|
||||
foreach(flag_var
|
||||
CMAKE_CXX_FLAGS CMAKE_CXX_FLAGS_DEBUG CMAKE_CXX_FLAGS_RELEASE
|
||||
CMAKE_CXX_FLAGS_MINSIZEREL CMAKE_CXX_FLAGS_RELWITHDEBINFO)
|
||||
if(${flag_var} MATCHES "/MD")
|
||||
string(REGEX REPLACE "/MD" "/MT" ${flag_var} "${${flag_var}}")
|
||||
endif(${flag_var} MATCHES "/MD")
|
||||
endforeach(flag_var)
|
||||
endmacro()
|
||||
|
||||
if (WITH_MKL)
|
||||
ADD_DEFINITIONS(-DUSE_MKL)
|
||||
endif()
|
||||
|
||||
if(NOT DEFINED PADDLE_LIB)
|
||||
message(FATAL_ERROR "please set PADDLE_LIB with -DPADDLE_LIB=/path/paddle/lib")
|
||||
endif()
|
||||
|
||||
if(NOT DEFINED OPENCV_DIR)
|
||||
message(FATAL_ERROR "please set OPENCV_DIR with -DOPENCV_DIR=/path/opencv")
|
||||
endif()
|
||||
|
||||
|
||||
if (WIN32)
|
||||
include_directories("${PADDLE_LIB}/paddle/fluid/inference")
|
||||
include_directories("${PADDLE_LIB}/paddle/include")
|
||||
link_directories("${PADDLE_LIB}/paddle/fluid/inference")
|
||||
find_package(OpenCV REQUIRED PATHS ${OPENCV_DIR}/build/ NO_DEFAULT_PATH)
|
||||
|
||||
else ()
|
||||
find_package(OpenCV REQUIRED PATHS ${OPENCV_DIR}/share/OpenCV NO_DEFAULT_PATH)
|
||||
include_directories("${PADDLE_LIB}/paddle/include")
|
||||
link_directories("${PADDLE_LIB}/paddle/lib")
|
||||
endif ()
|
||||
include_directories(${OpenCV_INCLUDE_DIRS})
|
||||
|
||||
if (WIN32)
|
||||
add_definitions("/DGOOGLE_GLOG_DLL_DECL=")
|
||||
set(CMAKE_C_FLAGS_DEBUG "${CMAKE_C_FLAGS_DEBUG} /bigobj /MTd")
|
||||
set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} /bigobj /MT")
|
||||
set(CMAKE_CXX_FLAGS_DEBUG "${CMAKE_CXX_FLAGS_DEBUG} /bigobj /MTd")
|
||||
set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} /bigobj /MT")
|
||||
if (WITH_STATIC_LIB)
|
||||
safe_set_static_flag()
|
||||
add_definitions(-DSTATIC_LIB)
|
||||
endif()
|
||||
else()
|
||||
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -g -o3 -std=c++11")
|
||||
set(CMAKE_STATIC_LIBRARY_PREFIX "")
|
||||
endif()
|
||||
message("flags" ${CMAKE_CXX_FLAGS})
|
||||
|
||||
|
||||
if (WITH_GPU)
|
||||
if (NOT DEFINED CUDA_LIB OR ${CUDA_LIB} STREQUAL "")
|
||||
message(FATAL_ERROR "please set CUDA_LIB with -DCUDA_LIB=/path/cuda-8.0/lib64")
|
||||
endif()
|
||||
if (NOT WIN32)
|
||||
if (NOT DEFINED CUDNN_LIB)
|
||||
message(FATAL_ERROR "please set CUDNN_LIB with -DCUDNN_LIB=/path/cudnn_v7.4/cuda/lib64")
|
||||
endif()
|
||||
endif(NOT WIN32)
|
||||
endif()
|
||||
|
||||
include_directories("${PADDLE_LIB}/third_party/install/protobuf/include")
|
||||
include_directories("${PADDLE_LIB}/third_party/install/glog/include")
|
||||
include_directories("${PADDLE_LIB}/third_party/install/gflags/include")
|
||||
include_directories("${PADDLE_LIB}/third_party/install/xxhash/include")
|
||||
include_directories("${PADDLE_LIB}/third_party/install/zlib/include")
|
||||
include_directories("${PADDLE_LIB}/third_party/boost")
|
||||
include_directories("${PADDLE_LIB}/third_party/eigen3")
|
||||
|
||||
include_directories("${CMAKE_SOURCE_DIR}/")
|
||||
|
||||
if (NOT WIN32)
|
||||
if (WITH_TENSORRT AND WITH_GPU)
|
||||
include_directories("${TENSORRT_DIR}/include")
|
||||
link_directories("${TENSORRT_DIR}/lib")
|
||||
endif()
|
||||
endif(NOT WIN32)
|
||||
|
||||
link_directories("${PADDLE_LIB}/third_party/install/zlib/lib")
|
||||
|
||||
link_directories("${PADDLE_LIB}/third_party/install/protobuf/lib")
|
||||
link_directories("${PADDLE_LIB}/third_party/install/glog/lib")
|
||||
link_directories("${PADDLE_LIB}/third_party/install/gflags/lib")
|
||||
link_directories("${PADDLE_LIB}/third_party/install/xxhash/lib")
|
||||
link_directories("${PADDLE_LIB}/paddle/lib")
|
||||
|
||||
|
||||
if(WITH_MKL)
|
||||
include_directories("${PADDLE_LIB}/third_party/install/mklml/include")
|
||||
if (WIN32)
|
||||
set(MATH_LIB ${PADDLE_LIB}/third_party/install/mklml/lib/mklml.lib
|
||||
${PADDLE_LIB}/third_party/install/mklml/lib/libiomp5md.lib)
|
||||
else ()
|
||||
set(MATH_LIB ${PADDLE_LIB}/third_party/install/mklml/lib/libmklml_intel${CMAKE_SHARED_LIBRARY_SUFFIX}
|
||||
${PADDLE_LIB}/third_party/install/mklml/lib/libiomp5${CMAKE_SHARED_LIBRARY_SUFFIX})
|
||||
execute_process(COMMAND cp -r ${PADDLE_LIB}/third_party/install/mklml/lib/libmklml_intel${CMAKE_SHARED_LIBRARY_SUFFIX} /usr/lib)
|
||||
endif ()
|
||||
set(MKLDNN_PATH "${PADDLE_LIB}/third_party/install/mkldnn")
|
||||
if(EXISTS ${MKLDNN_PATH})
|
||||
include_directories("${MKLDNN_PATH}/include")
|
||||
if (WIN32)
|
||||
set(MKLDNN_LIB ${MKLDNN_PATH}/lib/mkldnn.lib)
|
||||
else ()
|
||||
set(MKLDNN_LIB ${MKLDNN_PATH}/lib/libmkldnn.so.0)
|
||||
endif ()
|
||||
endif()
|
||||
else()
|
||||
set(MATH_LIB ${PADDLE_LIB}/third_party/install/openblas/lib/libopenblas${CMAKE_STATIC_LIBRARY_SUFFIX})
|
||||
endif()
|
||||
|
||||
# Note: libpaddle_inference_api.so/a must put before libpaddle_fluid.so/a
|
||||
if(WITH_STATIC_LIB)
|
||||
set(DEPS
|
||||
${PADDLE_LIB}/paddle/lib/libpaddle_fluid${CMAKE_STATIC_LIBRARY_SUFFIX})
|
||||
else()
|
||||
set(DEPS
|
||||
${PADDLE_LIB}/paddle/lib/libpaddle_fluid${CMAKE_SHARED_LIBRARY_SUFFIX})
|
||||
endif()
|
||||
|
||||
if (NOT WIN32)
|
||||
set(DEPS ${DEPS}
|
||||
${MATH_LIB} ${MKLDNN_LIB}
|
||||
glog gflags protobuf z xxhash
|
||||
)
|
||||
if(EXISTS "${PADDLE_LIB}/third_party/install/snappystream/lib")
|
||||
set(DEPS ${DEPS} snappystream)
|
||||
endif()
|
||||
if (EXISTS "${PADDLE_LIB}/third_party/install/snappy/lib")
|
||||
set(DEPS ${DEPS} snappy)
|
||||
endif()
|
||||
else()
|
||||
set(DEPS ${DEPS}
|
||||
${MATH_LIB} ${MKLDNN_LIB}
|
||||
glog gflags_static libprotobuf xxhash)
|
||||
set(DEPS ${DEPS} libcmt shlwapi)
|
||||
if (EXISTS "${PADDLE_LIB}/third_party/install/snappy/lib")
|
||||
set(DEPS ${DEPS} snappy)
|
||||
endif()
|
||||
if(EXISTS "${PADDLE_LIB}/third_party/install/snappystream/lib")
|
||||
set(DEPS ${DEPS} snappystream)
|
||||
endif()
|
||||
endif(NOT WIN32)
|
||||
|
||||
|
||||
if(WITH_GPU)
|
||||
if(NOT WIN32)
|
||||
if (WITH_TENSORRT)
|
||||
set(DEPS ${DEPS} ${TENSORRT_DIR}/lib/libnvinfer${CMAKE_SHARED_LIBRARY_SUFFIX})
|
||||
set(DEPS ${DEPS} ${TENSORRT_DIR}/lib/libnvinfer_plugin${CMAKE_SHARED_LIBRARY_SUFFIX})
|
||||
endif()
|
||||
set(DEPS ${DEPS} ${CUDA_LIB}/libcudart${CMAKE_SHARED_LIBRARY_SUFFIX})
|
||||
set(DEPS ${DEPS} ${CUDNN_LIB}/libcudnn${CMAKE_SHARED_LIBRARY_SUFFIX})
|
||||
else()
|
||||
set(DEPS ${DEPS} ${CUDA_LIB}/cudart${CMAKE_STATIC_LIBRARY_SUFFIX} )
|
||||
set(DEPS ${DEPS} ${CUDA_LIB}/cublas${CMAKE_STATIC_LIBRARY_SUFFIX} )
|
||||
set(DEPS ${DEPS} ${CUDNN_LIB}/cudnn${CMAKE_STATIC_LIBRARY_SUFFIX})
|
||||
endif()
|
||||
endif()
|
||||
|
||||
|
||||
if (NOT WIN32)
|
||||
set(EXTERNAL_LIB "-ldl -lrt -lgomp -lz -lm -lpthread")
|
||||
set(DEPS ${DEPS} ${EXTERNAL_LIB})
|
||||
endif()
|
||||
|
||||
set(DEPS ${DEPS} ${OpenCV_LIBS})
|
||||
|
||||
AUX_SOURCE_DIRECTORY(./src SRCS)
|
||||
add_executable(${DEMO_NAME} ${SRCS})
|
||||
|
||||
target_link_libraries(${DEMO_NAME} ${DEPS})
|
||||
|
||||
if (WIN32 AND WITH_MKL)
|
||||
add_custom_command(TARGET ${DEMO_NAME} POST_BUILD
|
||||
COMMAND ${CMAKE_COMMAND} -E copy_if_different ${PADDLE_LIB}/third_party/install/mklml/lib/mklml.dll ./mklml.dll
|
||||
COMMAND ${CMAKE_COMMAND} -E copy_if_different ${PADDLE_LIB}/third_party/install/mklml/lib/libiomp5md.dll ./libiomp5md.dll
|
||||
COMMAND ${CMAKE_COMMAND} -E copy_if_different ${PADDLE_LIB}/third_party/install/mkldnn/lib/mkldnn.dll ./mkldnn.dll
|
||||
COMMAND ${CMAKE_COMMAND} -E copy_if_different ${PADDLE_LIB}/third_party/install/mklml/lib/mklml.dll ./release/mklml.dll
|
||||
COMMAND ${CMAKE_COMMAND} -E copy_if_different ${PADDLE_LIB}/third_party/install/mklml/lib/libiomp5md.dll ./release/libiomp5md.dll
|
||||
COMMAND ${CMAKE_COMMAND} -E copy_if_different ${PADDLE_LIB}/third_party/install/mkldnn/lib/mkldnn.dll ./release/mkldnn.dll
|
||||
)
|
||||
endif()
|
||||
|
|
@ -0,0 +1,95 @@
|
|||
# Visual Studio 2019 Community CMake 编译指南
|
||||
|
||||
PaddleOCR在Windows 平台下基于`Visual Studio 2019 Community` 进行了测试。微软从`Visual Studio 2017`开始即支持直接管理`CMake`跨平台编译项目,但是直到`2019`才提供了稳定和完全的支持,所以如果你想使用CMake管理项目编译构建,我们推荐你使用`Visual Studio 2019`环境下构建。
|
||||
|
||||
|
||||
## 前置条件
|
||||
* Visual Studio 2019
|
||||
* CUDA 9.0 / CUDA 10.0,cudnn 7+ (仅在使用GPU版本的预测库时需要)
|
||||
* CMake 3.0+
|
||||
|
||||
请确保系统已经安装好上述基本软件,我们使用的是`VS2019`的社区版。
|
||||
|
||||
**下面所有示例以工作目录为 `D:\projects`演示**。
|
||||
|
||||
### Step1: 下载PaddlePaddle C++ 预测库 fluid_inference
|
||||
|
||||
PaddlePaddle C++ 预测库针对不同的`CPU`和`CUDA`版本提供了不同的预编译版本,请根据实际情况下载: [C++预测库下载列表](https://www.paddlepaddle.org.cn/documentation/docs/zh/develop/advanced_guide/inference_deployment/inference/windows_cpp_inference.html)
|
||||
|
||||
解压后`D:\projects\fluid_inference`目录包含内容为:
|
||||
```
|
||||
fluid_inference
|
||||
├── paddle # paddle核心库和头文件
|
||||
|
|
||||
├── third_party # 第三方依赖库和头文件
|
||||
|
|
||||
└── version.txt # 版本和编译信息
|
||||
```
|
||||
|
||||
### Step2: 安装配置OpenCV
|
||||
|
||||
1. 在OpenCV官网下载适用于Windows平台的3.4.6版本, [下载地址](https://sourceforge.net/projects/opencvlibrary/files/3.4.6/opencv-3.4.6-vc14_vc15.exe/download)
|
||||
2. 运行下载的可执行文件,将OpenCV解压至指定目录,如`D:\projects\opencv`
|
||||
3. 配置环境变量,如下流程所示
|
||||
- 我的电脑->属性->高级系统设置->环境变量
|
||||
- 在系统变量中找到Path(如没有,自行创建),并双击编辑
|
||||
- 新建,将opencv路径填入并保存,如`D:\projects\opencv\build\x64\vc14\bin`
|
||||
|
||||
### Step3: 使用Visual Studio 2019直接编译CMake
|
||||
|
||||
1. 打开Visual Studio 2019 Community,点击`继续但无需代码`
|
||||
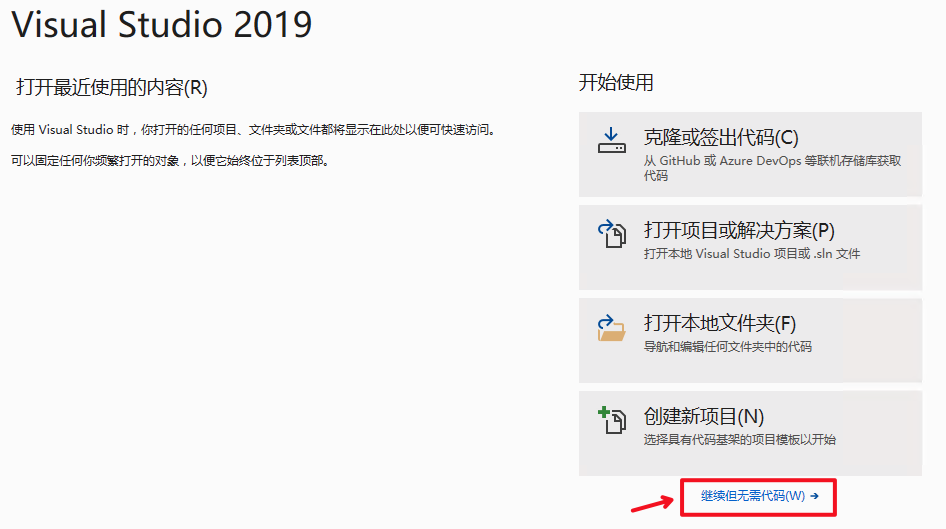
|
||||
2. 点击: `文件`->`打开`->`CMake`
|
||||
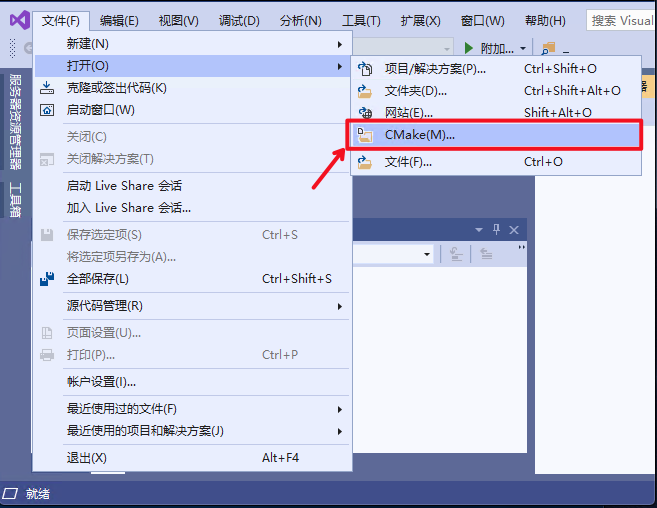
|
||||
|
||||
选择项目代码所在路径,并打开`CMakeList.txt`:
|
||||
|
||||
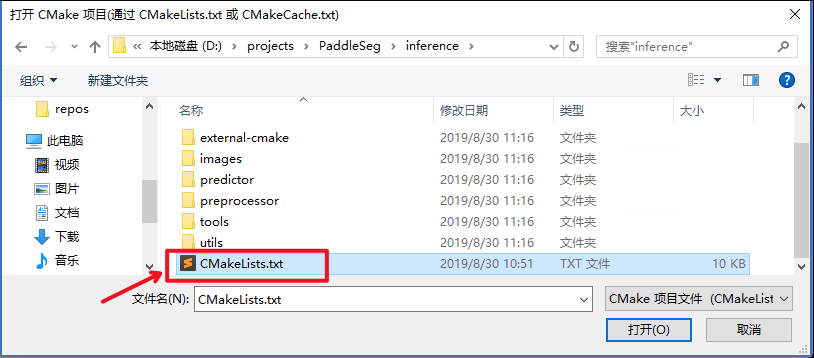
|
||||
|
||||
3. 点击:`项目`->`cpp_inference_demo的CMake设置`
|
||||
|
||||
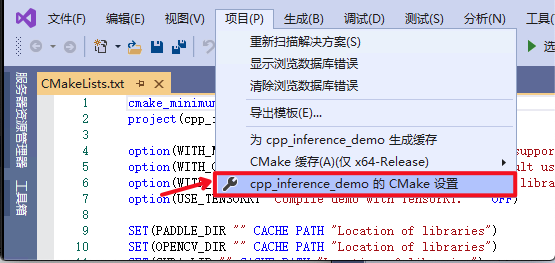
|
||||
|
||||
4. 点击`浏览`,分别设置编译选项指定`CUDA`、`CUDNN_LIB`、`OpenCV`、`Paddle预测库`的路径
|
||||
|
||||
三个编译参数的含义说明如下(带`*`表示仅在使用**GPU版本**预测库时指定, 其中CUDA库版本尽量对齐,**使用9.0、10.0版本,不使用9.2、10.1等版本CUDA库**):
|
||||
|
||||
| 参数名 | 含义 |
|
||||
| ---- | ---- |
|
||||
| *CUDA_LIB | CUDA的库路径 |
|
||||
| *CUDNN_LIB | CUDNN的库路径 |
|
||||
| OPENCV_DIR | OpenCV的安装路径 |
|
||||
| PADDLE_LIB | Paddle预测库的路径 |
|
||||
|
||||
**注意:**
|
||||
1. 使用`CPU`版预测库,请把`WITH_GPU`的勾去掉
|
||||
2. 如果使用的是`openblas`版本,请把`WITH_MKL`勾去掉
|
||||
|
||||
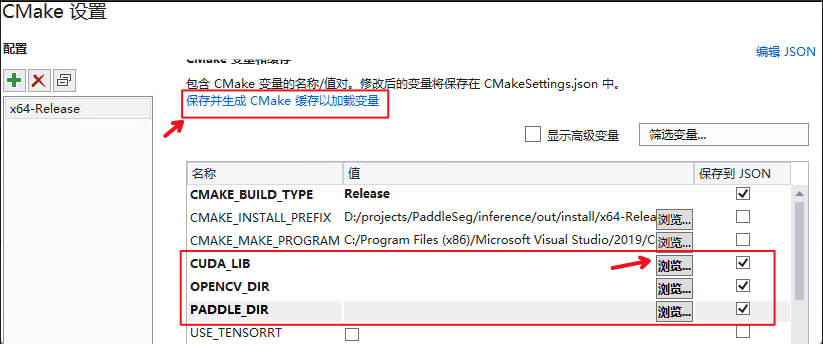
|
||||
|
||||
**设置完成后**, 点击上图中`保存并生成CMake缓存以加载变量`。
|
||||
|
||||
5. 点击`生成`->`全部生成`
|
||||
|
||||
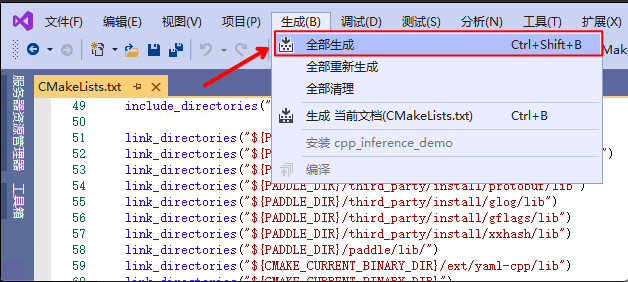
|
||||
|
||||
|
||||
### Step4: 预测及可视化
|
||||
|
||||
上述`Visual Studio 2019`编译产出的可执行文件在`out\build\x64-Release`目录下,打开`cmd`,并切换到该目录:
|
||||
|
||||
```
|
||||
cd D:\projects\PaddleOCR\deploy\cpp_infer\out\build\x64-Release
|
||||
```
|
||||
可执行文件`ocr_system.exe`即为样例的预测程序,其主要使用方法如下
|
||||
|
||||
```shell
|
||||
#预测图片 `D:\projects\PaddleOCR\doc\imgs\10.jpg`
|
||||
.\ocr_system.exe D:\projects\PaddleOCR\deploy\cpp_infer\tools\config.txt D:\projects\PaddleOCR\doc\imgs\10.jpg
|
||||
```
|
||||
|
||||
第一个参数为配置文件路径,第二个参数为需要预测的图片路径。
|
||||
|
||||
|
||||
### 注意
|
||||
* 在Windows下的终端中执行文件exe时,可能会发生乱码的现象,此时需要在终端中输入`CHCP 65001`,将终端的编码方式由GBK编码(默认)改为UTF-8编码,更加具体的解释可以参考这篇博客:[https://blog.csdn.net/qq_35038153/article/details/78430359](https://blog.csdn.net/qq_35038153/article/details/78430359)。
|
||||
|
|
@ -0,0 +1,423 @@
|
|||
/*******************************************************************************
|
||||
* *
|
||||
* Author : Angus Johnson *
|
||||
* Version : 6.4.2 *
|
||||
* Date : 27 February 2017 *
|
||||
* Website : http://www.angusj.com *
|
||||
* Copyright : Angus Johnson 2010-2017 *
|
||||
* *
|
||||
* License: *
|
||||
* Use, modification & distribution is subject to Boost Software License Ver 1. *
|
||||
* http://www.boost.org/LICENSE_1_0.txt *
|
||||
* *
|
||||
* Attributions: *
|
||||
* The code in this library is an extension of Bala Vatti's clipping algorithm: *
|
||||
* "A generic solution to polygon clipping" *
|
||||
* Communications of the ACM, Vol 35, Issue 7 (July 1992) pp 56-63. *
|
||||
* http://portal.acm.org/citation.cfm?id=129906 *
|
||||
* *
|
||||
* Computer graphics and geometric modeling: implementation and algorithms *
|
||||
* By Max K. Agoston *
|
||||
* Springer; 1 edition (January 4, 2005) *
|
||||
* http://books.google.com/books?q=vatti+clipping+agoston *
|
||||
* *
|
||||
* See also: *
|
||||
* "Polygon Offsetting by Computing Winding Numbers" *
|
||||
* Paper no. DETC2005-85513 pp. 565-575 *
|
||||
* ASME 2005 International Design Engineering Technical Conferences *
|
||||
* and Computers and Information in Engineering Conference (IDETC/CIE2005) *
|
||||
* September 24-28, 2005 , Long Beach, California, USA *
|
||||
* http://www.me.berkeley.edu/~mcmains/pubs/DAC05OffsetPolygon.pdf *
|
||||
* *
|
||||
*******************************************************************************/
|
||||
|
||||
#ifndef clipper_hpp
|
||||
#define clipper_hpp
|
||||
|
||||
#define CLIPPER_VERSION "6.4.2"
|
||||
|
||||
// use_int32: When enabled 32bit ints are used instead of 64bit ints. This
|
||||
// improve performance but coordinate values are limited to the range +/- 46340
|
||||
//#define use_int32
|
||||
|
||||
// use_xyz: adds a Z member to IntPoint. Adds a minor cost to perfomance.
|
||||
//#define use_xyz
|
||||
|
||||
// use_lines: Enables line clipping. Adds a very minor cost to performance.
|
||||
#define use_lines
|
||||
|
||||
// use_deprecated: Enables temporary support for the obsolete functions
|
||||
//#define use_deprecated
|
||||
|
||||
#include <cstdlib>
|
||||
#include <cstring>
|
||||
#include <functional>
|
||||
#include <list>
|
||||
#include <ostream>
|
||||
#include <queue>
|
||||
#include <set>
|
||||
#include <stdexcept>
|
||||
#include <vector>
|
||||
|
||||
namespace ClipperLib {
|
||||
|
||||
enum ClipType { ctIntersection, ctUnion, ctDifference, ctXor };
|
||||
enum PolyType { ptSubject, ptClip };
|
||||
// By far the most widely used winding rules for polygon filling are
|
||||
// EvenOdd & NonZero (GDI, GDI+, XLib, OpenGL, Cairo, AGG, Quartz, SVG, Gr32)
|
||||
// Others rules include Positive, Negative and ABS_GTR_EQ_TWO (only in OpenGL)
|
||||
// see http://glprogramming.com/red/chapter11.html
|
||||
enum PolyFillType { pftEvenOdd, pftNonZero, pftPositive, pftNegative };
|
||||
|
||||
#ifdef use_int32
|
||||
typedef int cInt;
|
||||
static cInt const loRange = 0x7FFF;
|
||||
static cInt const hiRange = 0x7FFF;
|
||||
#else
|
||||
typedef signed long long cInt;
|
||||
static cInt const loRange = 0x3FFFFFFF;
|
||||
static cInt const hiRange = 0x3FFFFFFFFFFFFFFFLL;
|
||||
typedef signed long long long64; // used by Int128 class
|
||||
typedef unsigned long long ulong64;
|
||||
|
||||
#endif
|
||||
|
||||
struct IntPoint {
|
||||
cInt X;
|
||||
cInt Y;
|
||||
#ifdef use_xyz
|
||||
cInt Z;
|
||||
IntPoint(cInt x = 0, cInt y = 0, cInt z = 0) : X(x), Y(y), Z(z){};
|
||||
#else
|
||||
IntPoint(cInt x = 0, cInt y = 0) : X(x), Y(y){};
|
||||
#endif
|
||||
|
||||
friend inline bool operator==(const IntPoint &a, const IntPoint &b) {
|
||||
return a.X == b.X && a.Y == b.Y;
|
||||
}
|
||||
friend inline bool operator!=(const IntPoint &a, const IntPoint &b) {
|
||||
return a.X != b.X || a.Y != b.Y;
|
||||
}
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
typedef std::vector<IntPoint> Path;
|
||||
typedef std::vector<Path> Paths;
|
||||
|
||||
inline Path &operator<<(Path &poly, const IntPoint &p) {
|
||||
poly.push_back(p);
|
||||
return poly;
|
||||
}
|
||||
inline Paths &operator<<(Paths &polys, const Path &p) {
|
||||
polys.push_back(p);
|
||||
return polys;
|
||||
}
|
||||
|
||||
std::ostream &operator<<(std::ostream &s, const IntPoint &p);
|
||||
std::ostream &operator<<(std::ostream &s, const Path &p);
|
||||
std::ostream &operator<<(std::ostream &s, const Paths &p);
|
||||
|
||||
struct DoublePoint {
|
||||
double X;
|
||||
double Y;
|
||||
DoublePoint(double x = 0, double y = 0) : X(x), Y(y) {}
|
||||
DoublePoint(IntPoint ip) : X((double)ip.X), Y((double)ip.Y) {}
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
#ifdef use_xyz
|
||||
typedef void (*ZFillCallback)(IntPoint &e1bot, IntPoint &e1top, IntPoint &e2bot,
|
||||
IntPoint &e2top, IntPoint &pt);
|
||||
#endif
|
||||
|
||||
enum InitOptions {
|
||||
ioReverseSolution = 1,
|
||||
ioStrictlySimple = 2,
|
||||
ioPreserveCollinear = 4
|
||||
};
|
||||
enum JoinType { jtSquare, jtRound, jtMiter };
|
||||
enum EndType {
|
||||
etClosedPolygon,
|
||||
etClosedLine,
|
||||
etOpenButt,
|
||||
etOpenSquare,
|
||||
etOpenRound
|
||||
};
|
||||
|
||||
class PolyNode;
|
||||
typedef std::vector<PolyNode *> PolyNodes;
|
||||
|
||||
class PolyNode {
|
||||
public:
|
||||
PolyNode();
|
||||
virtual ~PolyNode(){};
|
||||
Path Contour;
|
||||
PolyNodes Childs;
|
||||
PolyNode *Parent;
|
||||
PolyNode *GetNext() const;
|
||||
bool IsHole() const;
|
||||
bool IsOpen() const;
|
||||
int ChildCount() const;
|
||||
|
||||
private:
|
||||
// PolyNode& operator =(PolyNode& other);
|
||||
unsigned Index; // node index in Parent.Childs
|
||||
bool m_IsOpen;
|
||||
JoinType m_jointype;
|
||||
EndType m_endtype;
|
||||
PolyNode *GetNextSiblingUp() const;
|
||||
void AddChild(PolyNode &child);
|
||||
friend class Clipper; // to access Index
|
||||
friend class ClipperOffset;
|
||||
};
|
||||
|
||||
class PolyTree : public PolyNode {
|
||||
public:
|
||||
~PolyTree() { Clear(); };
|
||||
PolyNode *GetFirst() const;
|
||||
void Clear();
|
||||
int Total() const;
|
||||
|
||||
private:
|
||||
// PolyTree& operator =(PolyTree& other);
|
||||
PolyNodes AllNodes;
|
||||
friend class Clipper; // to access AllNodes
|
||||
};
|
||||
|
||||
bool Orientation(const Path &poly);
|
||||
double Area(const Path &poly);
|
||||
int PointInPolygon(const IntPoint &pt, const Path &path);
|
||||
|
||||
void SimplifyPolygon(const Path &in_poly, Paths &out_polys,
|
||||
PolyFillType fillType = pftEvenOdd);
|
||||
void SimplifyPolygons(const Paths &in_polys, Paths &out_polys,
|
||||
PolyFillType fillType = pftEvenOdd);
|
||||
void SimplifyPolygons(Paths &polys, PolyFillType fillType = pftEvenOdd);
|
||||
|
||||
void CleanPolygon(const Path &in_poly, Path &out_poly, double distance = 1.415);
|
||||
void CleanPolygon(Path &poly, double distance = 1.415);
|
||||
void CleanPolygons(const Paths &in_polys, Paths &out_polys,
|
||||
double distance = 1.415);
|
||||
void CleanPolygons(Paths &polys, double distance = 1.415);
|
||||
|
||||
void MinkowskiSum(const Path &pattern, const Path &path, Paths &solution,
|
||||
bool pathIsClosed);
|
||||
void MinkowskiSum(const Path &pattern, const Paths &paths, Paths &solution,
|
||||
bool pathIsClosed);
|
||||
void MinkowskiDiff(const Path &poly1, const Path &poly2, Paths &solution);
|
||||
|
||||
void PolyTreeToPaths(const PolyTree &polytree, Paths &paths);
|
||||
void ClosedPathsFromPolyTree(const PolyTree &polytree, Paths &paths);
|
||||
void OpenPathsFromPolyTree(PolyTree &polytree, Paths &paths);
|
||||
|
||||
void ReversePath(Path &p);
|
||||
void ReversePaths(Paths &p);
|
||||
|
||||
struct IntRect {
|
||||
cInt left;
|
||||
cInt top;
|
||||
cInt right;
|
||||
cInt bottom;
|
||||
};
|
||||
|
||||
// enums that are used internally ...
|
||||
enum EdgeSide { esLeft = 1, esRight = 2 };
|
||||
|
||||
// forward declarations (for stuff used internally) ...
|
||||
struct TEdge;
|
||||
struct IntersectNode;
|
||||
struct LocalMinimum;
|
||||
struct OutPt;
|
||||
struct OutRec;
|
||||
struct Join;
|
||||
|
||||
typedef std::vector<OutRec *> PolyOutList;
|
||||
typedef std::vector<TEdge *> EdgeList;
|
||||
typedef std::vector<Join *> JoinList;
|
||||
typedef std::vector<IntersectNode *> IntersectList;
|
||||
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
// ClipperBase is the ancestor to the Clipper class. It should not be
|
||||
// instantiated directly. This class simply abstracts the conversion of sets of
|
||||
// polygon coordinates into edge objects that are stored in a LocalMinima list.
|
||||
class ClipperBase {
|
||||
public:
|
||||
ClipperBase();
|
||||
virtual ~ClipperBase();
|
||||
virtual bool AddPath(const Path &pg, PolyType PolyTyp, bool Closed);
|
||||
bool AddPaths(const Paths &ppg, PolyType PolyTyp, bool Closed);
|
||||
virtual void Clear();
|
||||
IntRect GetBounds();
|
||||
bool PreserveCollinear() { return m_PreserveCollinear; };
|
||||
void PreserveCollinear(bool value) { m_PreserveCollinear = value; };
|
||||
|
||||
protected:
|
||||
void DisposeLocalMinimaList();
|
||||
TEdge *AddBoundsToLML(TEdge *e, bool IsClosed);
|
||||
virtual void Reset();
|
||||
TEdge *ProcessBound(TEdge *E, bool IsClockwise);
|
||||
void InsertScanbeam(const cInt Y);
|
||||
bool PopScanbeam(cInt &Y);
|
||||
bool LocalMinimaPending();
|
||||
bool PopLocalMinima(cInt Y, const LocalMinimum *&locMin);
|
||||
OutRec *CreateOutRec();
|
||||
void DisposeAllOutRecs();
|
||||
void DisposeOutRec(PolyOutList::size_type index);
|
||||
void SwapPositionsInAEL(TEdge *edge1, TEdge *edge2);
|
||||
void DeleteFromAEL(TEdge *e);
|
||||
void UpdateEdgeIntoAEL(TEdge *&e);
|
||||
|
||||
typedef std::vector<LocalMinimum> MinimaList;
|
||||
MinimaList::iterator m_CurrentLM;
|
||||
MinimaList m_MinimaList;
|
||||
|
||||
bool m_UseFullRange;
|
||||
EdgeList m_edges;
|
||||
bool m_PreserveCollinear;
|
||||
bool m_HasOpenPaths;
|
||||
PolyOutList m_PolyOuts;
|
||||
TEdge *m_ActiveEdges;
|
||||
|
||||
typedef std::priority_queue<cInt> ScanbeamList;
|
||||
ScanbeamList m_Scanbeam;
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
class Clipper : public virtual ClipperBase {
|
||||
public:
|
||||
Clipper(int initOptions = 0);
|
||||
bool Execute(ClipType clipType, Paths &solution,
|
||||
PolyFillType fillType = pftEvenOdd);
|
||||
bool Execute(ClipType clipType, Paths &solution, PolyFillType subjFillType,
|
||||
PolyFillType clipFillType);
|
||||
bool Execute(ClipType clipType, PolyTree &polytree,
|
||||
PolyFillType fillType = pftEvenOdd);
|
||||
bool Execute(ClipType clipType, PolyTree &polytree, PolyFillType subjFillType,
|
||||
PolyFillType clipFillType);
|
||||
bool ReverseSolution() { return m_ReverseOutput; };
|
||||
void ReverseSolution(bool value) { m_ReverseOutput = value; };
|
||||
bool StrictlySimple() { return m_StrictSimple; };
|
||||
void StrictlySimple(bool value) { m_StrictSimple = value; };
|
||||
// set the callback function for z value filling on intersections (otherwise Z
|
||||
// is 0)
|
||||
#ifdef use_xyz
|
||||
void ZFillFunction(ZFillCallback zFillFunc);
|
||||
#endif
|
||||
protected:
|
||||
virtual bool ExecuteInternal();
|
||||
|
||||
private:
|
||||
JoinList m_Joins;
|
||||
JoinList m_GhostJoins;
|
||||
IntersectList m_IntersectList;
|
||||
ClipType m_ClipType;
|
||||
typedef std::list<cInt> MaximaList;
|
||||
MaximaList m_Maxima;
|
||||
TEdge *m_SortedEdges;
|
||||
bool m_ExecuteLocked;
|
||||
PolyFillType m_ClipFillType;
|
||||
PolyFillType m_SubjFillType;
|
||||
bool m_ReverseOutput;
|
||||
bool m_UsingPolyTree;
|
||||
bool m_StrictSimple;
|
||||
#ifdef use_xyz
|
||||
ZFillCallback m_ZFill; // custom callback
|
||||
#endif
|
||||
void SetWindingCount(TEdge &edge);
|
||||
bool IsEvenOddFillType(const TEdge &edge) const;
|
||||
bool IsEvenOddAltFillType(const TEdge &edge) const;
|
||||
void InsertLocalMinimaIntoAEL(const cInt botY);
|
||||
void InsertEdgeIntoAEL(TEdge *edge, TEdge *startEdge);
|
||||
void AddEdgeToSEL(TEdge *edge);
|
||||
bool PopEdgeFromSEL(TEdge *&edge);
|
||||
void CopyAELToSEL();
|
||||
void DeleteFromSEL(TEdge *e);
|
||||
void SwapPositionsInSEL(TEdge *edge1, TEdge *edge2);
|
||||
bool IsContributing(const TEdge &edge) const;
|
||||
bool IsTopHorz(const cInt XPos);
|
||||
void DoMaxima(TEdge *e);
|
||||
void ProcessHorizontals();
|
||||
void ProcessHorizontal(TEdge *horzEdge);
|
||||
void AddLocalMaxPoly(TEdge *e1, TEdge *e2, const IntPoint &pt);
|
||||
OutPt *AddLocalMinPoly(TEdge *e1, TEdge *e2, const IntPoint &pt);
|
||||
OutRec *GetOutRec(int idx);
|
||||
void AppendPolygon(TEdge *e1, TEdge *e2);
|
||||
void IntersectEdges(TEdge *e1, TEdge *e2, IntPoint &pt);
|
||||
OutPt *AddOutPt(TEdge *e, const IntPoint &pt);
|
||||
OutPt *GetLastOutPt(TEdge *e);
|
||||
bool ProcessIntersections(const cInt topY);
|
||||
void BuildIntersectList(const cInt topY);
|
||||
void ProcessIntersectList();
|
||||
void ProcessEdgesAtTopOfScanbeam(const cInt topY);
|
||||
void BuildResult(Paths &polys);
|
||||
void BuildResult2(PolyTree &polytree);
|
||||
void SetHoleState(TEdge *e, OutRec *outrec);
|
||||
void DisposeIntersectNodes();
|
||||
bool FixupIntersectionOrder();
|
||||
void FixupOutPolygon(OutRec &outrec);
|
||||
void FixupOutPolyline(OutRec &outrec);
|
||||
bool IsHole(TEdge *e);
|
||||
bool FindOwnerFromSplitRecs(OutRec &outRec, OutRec *&currOrfl);
|
||||
void FixHoleLinkage(OutRec &outrec);
|
||||
void AddJoin(OutPt *op1, OutPt *op2, const IntPoint offPt);
|
||||
void ClearJoins();
|
||||
void ClearGhostJoins();
|
||||
void AddGhostJoin(OutPt *op, const IntPoint offPt);
|
||||
bool JoinPoints(Join *j, OutRec *outRec1, OutRec *outRec2);
|
||||
void JoinCommonEdges();
|
||||
void DoSimplePolygons();
|
||||
void FixupFirstLefts1(OutRec *OldOutRec, OutRec *NewOutRec);
|
||||
void FixupFirstLefts2(OutRec *InnerOutRec, OutRec *OuterOutRec);
|
||||
void FixupFirstLefts3(OutRec *OldOutRec, OutRec *NewOutRec);
|
||||
#ifdef use_xyz
|
||||
void SetZ(IntPoint &pt, TEdge &e1, TEdge &e2);
|
||||
#endif
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
class ClipperOffset {
|
||||
public:
|
||||
ClipperOffset(double miterLimit = 2.0, double roundPrecision = 0.25);
|
||||
~ClipperOffset();
|
||||
void AddPath(const Path &path, JoinType joinType, EndType endType);
|
||||
void AddPaths(const Paths &paths, JoinType joinType, EndType endType);
|
||||
void Execute(Paths &solution, double delta);
|
||||
void Execute(PolyTree &solution, double delta);
|
||||
void Clear();
|
||||
double MiterLimit;
|
||||
double ArcTolerance;
|
||||
|
||||
private:
|
||||
Paths m_destPolys;
|
||||
Path m_srcPoly;
|
||||
Path m_destPoly;
|
||||
std::vector<DoublePoint> m_normals;
|
||||
double m_delta, m_sinA, m_sin, m_cos;
|
||||
double m_miterLim, m_StepsPerRad;
|
||||
IntPoint m_lowest;
|
||||
PolyNode m_polyNodes;
|
||||
|
||||
void FixOrientations();
|
||||
void DoOffset(double delta);
|
||||
void OffsetPoint(int j, int &k, JoinType jointype);
|
||||
void DoSquare(int j, int k);
|
||||
void DoMiter(int j, int k, double r);
|
||||
void DoRound(int j, int k);
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
class clipperException : public std::exception {
|
||||
public:
|
||||
clipperException(const char *description) : m_descr(description) {}
|
||||
virtual ~clipperException() throw() {}
|
||||
virtual const char *what() const throw() { return m_descr.c_str(); }
|
||||
|
||||
private:
|
||||
std::string m_descr;
|
||||
};
|
||||
//------------------------------------------------------------------------------
|
||||
|
||||
} // ClipperLib namespace
|
||||
|
||||
#endif // clipper_hpp
|
||||
|
|
@ -0,0 +1,99 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#pragma once
|
||||
|
||||
#include <iomanip>
|
||||
#include <iostream>
|
||||
#include <map>
|
||||
#include <ostream>
|
||||
#include <string>
|
||||
#include <vector>
|
||||
|
||||
#include "include/utility.h"
|
||||
|
||||
namespace PaddleOCR {
|
||||
|
||||
class Config {
|
||||
public:
|
||||
explicit Config(const std::string &config_file) {
|
||||
config_map_ = LoadConfig(config_file);
|
||||
|
||||
this->use_gpu = bool(stoi(config_map_["use_gpu"]));
|
||||
|
||||
this->gpu_id = stoi(config_map_["gpu_id"]);
|
||||
|
||||
this->gpu_mem = stoi(config_map_["gpu_mem"]);
|
||||
|
||||
this->cpu_math_library_num_threads =
|
||||
stoi(config_map_["cpu_math_library_num_threads"]);
|
||||
|
||||
this->use_mkldnn = bool(stoi(config_map_["use_mkldnn"]));
|
||||
|
||||
this->max_side_len = stoi(config_map_["max_side_len"]);
|
||||
|
||||
this->det_db_thresh = stod(config_map_["det_db_thresh"]);
|
||||
|
||||
this->det_db_box_thresh = stod(config_map_["det_db_box_thresh"]);
|
||||
|
||||
this->det_db_box_thresh = stod(config_map_["det_db_box_thresh"]);
|
||||
|
||||
this->det_model_dir.assign(config_map_["det_model_dir"]);
|
||||
|
||||
this->rec_model_dir.assign(config_map_["rec_model_dir"]);
|
||||
|
||||
this->char_list_file.assign(config_map_["char_list_file"]);
|
||||
|
||||
this->visualize = bool(stoi(config_map_["visualize"]));
|
||||
}
|
||||
|
||||
bool use_gpu = false;
|
||||
|
||||
int gpu_id = 0;
|
||||
|
||||
int gpu_mem = 4000;
|
||||
|
||||
int cpu_math_library_num_threads = 1;
|
||||
|
||||
bool use_mkldnn = false;
|
||||
|
||||
int max_side_len = 960;
|
||||
|
||||
double det_db_thresh = 0.3;
|
||||
|
||||
double det_db_box_thresh = 0.5;
|
||||
|
||||
double det_db_unclip_ratio = 2.0;
|
||||
|
||||
std::string det_model_dir;
|
||||
|
||||
std::string rec_model_dir;
|
||||
|
||||
std::string char_list_file;
|
||||
|
||||
bool visualize = true;
|
||||
|
||||
void PrintConfigInfo();
|
||||
|
||||
private:
|
||||
// Load configuration
|
||||
std::map<std::string, std::string> LoadConfig(const std::string &config_file);
|
||||
|
||||
std::vector<std::string> split(const std::string &str,
|
||||
const std::string &delim);
|
||||
|
||||
std::map<std::string, std::string> config_map_;
|
||||
};
|
||||
|
||||
} // namespace PaddleOCR
|
||||
|
|
@ -0,0 +1,100 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "opencv2/core.hpp"
|
||||
#include "opencv2/imgcodecs.hpp"
|
||||
#include "opencv2/imgproc.hpp"
|
||||
#include "paddle_api.h"
|
||||
#include "paddle_inference_api.h"
|
||||
#include <chrono>
|
||||
#include <iomanip>
|
||||
#include <iostream>
|
||||
#include <ostream>
|
||||
#include <vector>
|
||||
|
||||
#include <cstring>
|
||||
#include <fstream>
|
||||
#include <numeric>
|
||||
|
||||
#include <include/postprocess_op.h>
|
||||
#include <include/preprocess_op.h>
|
||||
|
||||
namespace PaddleOCR {
|
||||
|
||||
class DBDetector {
|
||||
public:
|
||||
explicit DBDetector(const std::string &model_dir, const bool &use_gpu,
|
||||
const int &gpu_id, const int &gpu_mem,
|
||||
const int &cpu_math_library_num_threads,
|
||||
const bool &use_mkldnn, const int &max_side_len,
|
||||
const double &det_db_thresh,
|
||||
const double &det_db_box_thresh,
|
||||
const double &det_db_unclip_ratio,
|
||||
const bool &visualize) {
|
||||
this->use_gpu_ = use_gpu;
|
||||
this->gpu_id_ = gpu_id;
|
||||
this->gpu_mem_ = gpu_mem;
|
||||
this->cpu_math_library_num_threads_ = cpu_math_library_num_threads;
|
||||
this->use_mkldnn_ = use_mkldnn;
|
||||
|
||||
this->max_side_len_ = max_side_len;
|
||||
|
||||
this->det_db_thresh_ = det_db_thresh;
|
||||
this->det_db_box_thresh_ = det_db_box_thresh;
|
||||
this->det_db_unclip_ratio_ = det_db_unclip_ratio;
|
||||
|
||||
this->visualize_ = visualize;
|
||||
|
||||
LoadModel(model_dir);
|
||||
}
|
||||
|
||||
// Load Paddle inference model
|
||||
void LoadModel(const std::string &model_dir);
|
||||
|
||||
// Run predictor
|
||||
void Run(cv::Mat &img, std::vector<std::vector<std::vector<int>>> &boxes);
|
||||
|
||||
private:
|
||||
std::shared_ptr<PaddlePredictor> predictor_;
|
||||
|
||||
bool use_gpu_ = false;
|
||||
int gpu_id_ = 0;
|
||||
int gpu_mem_ = 4000;
|
||||
int cpu_math_library_num_threads_ = 4;
|
||||
bool use_mkldnn_ = false;
|
||||
|
||||
int max_side_len_ = 960;
|
||||
|
||||
double det_db_thresh_ = 0.3;
|
||||
double det_db_box_thresh_ = 0.5;
|
||||
double det_db_unclip_ratio_ = 2.0;
|
||||
|
||||
bool visualize_ = true;
|
||||
|
||||
std::vector<float> mean_ = {0.485f, 0.456f, 0.406f};
|
||||
std::vector<float> scale_ = {1 / 0.229f, 1 / 0.224f, 1 / 0.225f};
|
||||
bool is_scale_ = true;
|
||||
|
||||
// pre-process
|
||||
ResizeImgType0 resize_op_;
|
||||
Normalize normalize_op_;
|
||||
Permute permute_op_;
|
||||
|
||||
// post-process
|
||||
PostProcessor post_processor_;
|
||||
};
|
||||
|
||||
} // namespace PaddleOCR
|
||||
|
|
@ -0,0 +1,87 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#include "opencv2/core.hpp"
|
||||
#include "opencv2/imgcodecs.hpp"
|
||||
#include "opencv2/imgproc.hpp"
|
||||
#include "paddle_api.h"
|
||||
#include "paddle_inference_api.h"
|
||||
#include <chrono>
|
||||
#include <iomanip>
|
||||
#include <iostream>
|
||||
#include <ostream>
|
||||
#include <vector>
|
||||
|
||||
#include <cstring>
|
||||
#include <fstream>
|
||||
#include <numeric>
|
||||
|
||||
#include <include/postprocess_op.h>
|
||||
#include <include/preprocess_op.h>
|
||||
#include <include/utility.h>
|
||||
|
||||
namespace PaddleOCR {
|
||||
|
||||
class CRNNRecognizer {
|
||||
public:
|
||||
explicit CRNNRecognizer(const std::string &model_dir, const bool &use_gpu,
|
||||
const int &gpu_id, const int &gpu_mem,
|
||||
const int &cpu_math_library_num_threads,
|
||||
const bool &use_mkldnn, const string &label_path) {
|
||||
this->use_gpu_ = use_gpu;
|
||||
this->gpu_id_ = gpu_id;
|
||||
this->gpu_mem_ = gpu_mem;
|
||||
this->cpu_math_library_num_threads_ = cpu_math_library_num_threads;
|
||||
this->use_mkldnn_ = use_mkldnn;
|
||||
|
||||
this->label_list_ = Utility::ReadDict(label_path);
|
||||
this->label_list_.push_back(" ");
|
||||
|
||||
LoadModel(model_dir);
|
||||
}
|
||||
|
||||
// Load Paddle inference model
|
||||
void LoadModel(const std::string &model_dir);
|
||||
|
||||
void Run(std::vector<std::vector<std::vector<int>>> boxes, cv::Mat &img);
|
||||
|
||||
private:
|
||||
std::shared_ptr<PaddlePredictor> predictor_;
|
||||
|
||||
bool use_gpu_ = false;
|
||||
int gpu_id_ = 0;
|
||||
int gpu_mem_ = 4000;
|
||||
int cpu_math_library_num_threads_ = 4;
|
||||
bool use_mkldnn_ = false;
|
||||
|
||||
std::vector<std::string> label_list_;
|
||||
|
||||
std::vector<float> mean_ = {0.5f, 0.5f, 0.5f};
|
||||
std::vector<float> scale_ = {1 / 0.5f, 1 / 0.5f, 1 / 0.5f};
|
||||
bool is_scale_ = true;
|
||||
|
||||
// pre-process
|
||||
CrnnResizeImg resize_op_;
|
||||
Normalize normalize_op_;
|
||||
Permute permute_op_;
|
||||
|
||||
// post-process
|
||||
PostProcessor post_processor_;
|
||||
|
||||
cv::Mat GetRotateCropImage(const cv::Mat &srcimage,
|
||||
std::vector<std::vector<int>> box);
|
||||
|
||||
}; // class CrnnRecognizer
|
||||
|
||||
} // namespace PaddleOCR
|
||||
|
|
@ -0,0 +1,91 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "opencv2/core.hpp"
|
||||
#include "opencv2/imgcodecs.hpp"
|
||||
#include "opencv2/imgproc.hpp"
|
||||
#include <chrono>
|
||||
#include <iomanip>
|
||||
#include <iostream>
|
||||
#include <ostream>
|
||||
#include <vector>
|
||||
|
||||
#include <cstring>
|
||||
#include <fstream>
|
||||
#include <numeric>
|
||||
|
||||
#include "include/clipper.h"
|
||||
#include "include/utility.h"
|
||||
|
||||
using namespace std;
|
||||
|
||||
namespace PaddleOCR {
|
||||
|
||||
class PostProcessor {
|
||||
public:
|
||||
void GetContourArea(const std::vector<std::vector<float>> &box,
|
||||
float unclip_ratio, float &distance);
|
||||
|
||||
cv::RotatedRect UnClip(std::vector<std::vector<float>> box,
|
||||
const float &unclip_ratio);
|
||||
|
||||
float **Mat2Vec(cv::Mat mat);
|
||||
|
||||
std::vector<std::vector<int>>
|
||||
OrderPointsClockwise(std::vector<std::vector<int>> pts);
|
||||
|
||||
std::vector<std::vector<float>> GetMiniBoxes(cv::RotatedRect box,
|
||||
float &ssid);
|
||||
|
||||
float BoxScoreFast(std::vector<std::vector<float>> box_array, cv::Mat pred);
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
BoxesFromBitmap(const cv::Mat pred, const cv::Mat bitmap,
|
||||
const float &box_thresh, const float &det_db_unclip_ratio);
|
||||
|
||||
std::vector<std::vector<std::vector<int>>>
|
||||
FilterTagDetRes(std::vector<std::vector<std::vector<int>>> boxes,
|
||||
float ratio_h, float ratio_w, cv::Mat srcimg);
|
||||
|
||||
private:
|
||||
static bool XsortInt(std::vector<int> a, std::vector<int> b);
|
||||
|
||||
static bool XsortFp32(std::vector<float> a, std::vector<float> b);
|
||||
|
||||
std::vector<std::vector<float>> Mat2Vector(cv::Mat mat);
|
||||
|
||||
inline int _max(int a, int b) { return a >= b ? a : b; }
|
||||
|
||||
inline int _min(int a, int b) { return a >= b ? b : a; }
|
||||
|
||||
template <class T> inline T clamp(T x, T min, T max) {
|
||||
if (x > max)
|
||||
return max;
|
||||
if (x < min)
|
||||
return min;
|
||||
return x;
|
||||
}
|
||||
|
||||
inline float clampf(float x, float min, float max) {
|
||||
if (x > max)
|
||||
return max;
|
||||
if (x < min)
|
||||
return min;
|
||||
return x;
|
||||
}
|
||||
};
|
||||
|
||||
} // namespace PaddleOCR
|
||||
|
|
@ -0,0 +1,59 @@
|
|||
// Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
|
||||
//
|
||||
// Licensed under the Apache License, Version 2.0 (the "License");
|
||||
// you may not use this file except in compliance with the License.
|
||||
// You may obtain a copy of the License at
|
||||
//
|
||||
// http://www.apache.org/licenses/LICENSE-2.0
|
||||
//
|
||||
// Unless required by applicable law or agreed to in writing, software
|
||||
// distributed under the License is distributed on an "AS IS" BASIS,
|
||||
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
// See the License for the specific language governing permissions and
|
||||
// limitations under the License.
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "opencv2/core.hpp"
|
||||
#include "opencv2/imgcodecs.hpp"
|
||||
#include "opencv2/imgproc.hpp"
|
||||
#include <chrono>
|
||||
#include <iomanip>
|
||||
#include <iostream>
|
||||
#include <ostream>
|
||||
#include <vector>
|
||||
|
||||
#include <cstring>
|
||||
#include <fstream>
|
||||
#include <numeric>
|
||||
|
||||
using namespace std;
|
||||
using namespace paddle;
|
||||
|
||||
namespace PaddleOCR {
|
||||
|
||||
class Normalize {
|
||||
public:
|
||||
virtual void Run(cv::Mat *im, const std::vector<float> &mean,
|
||||
const std::vector<float> &scale, const bool is_scale = true);
|
||||
};
|
||||
|
||||
// RGB -> CHW
|
||||
class Permute {
|
||||
public:
|
||||
virtual void Run(const cv::Mat *im, float *data);
|
||||
};
|
||||
|
||||
class ResizeImgType0 {
|
||||
public:
|
||||
virtual void Run(const cv::Mat &img, cv::Mat &resize_img, int max_size_len,
|
||||
float &ratio_h, float &ratio_w);
|
||||
};
|
||||
|
||||
class CrnnResizeImg {
|
||||
public:
|
||||
virtual void Run(const cv::Mat &img, cv::Mat &resize_img, float wh_ratio,
|
||||
const std::vector<int> &rec_image_shape = {3, 32, 320});
|
||||
};
|
||||
|
||||
} // namespace PaddleOCR
|
||||