- -
-
-
-
- -
-
-
- -
-MAXGO
- -
- -
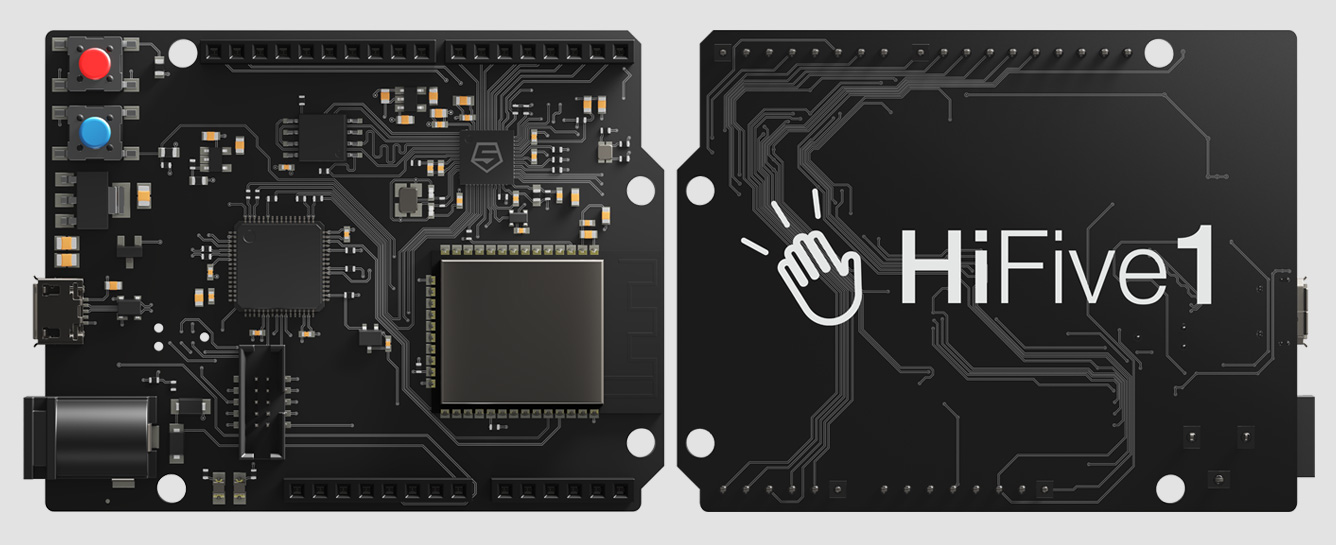
-| 序号 | 描述 | 序号 | 描述 |
-| ---- | ---- | ---- | ---- |
-| 1 | 选择供电跳线 |13|CPU复位按键(用于软核)|
-| 2 | UART/JTAG共用USB接口 |14|FPGA 配置复位按键|
-| 3 | 外部配置跳线柱(SD/USB) |15|模拟信号Pmod端口(XADC)|
-| 4 | Pmod端口 |16|编程模式跳线柱|
-| 5 | 扩音器 |17|音频连接口|
-| 6 | 电源测试点 |18|VGA连接口|
-| 7 | 16个LED |19|FPGA编程完成LED|
-| 8 | 16个按键开关 |20|以太网连接口|
-| 9 | 8位7段数码管 |21|USB连接口|
-| 10 | 可选用与外部接线的JTAG端口 |22|(工业用)PIC24编程端口|
-| 11 | 5个按键开关 |23|电源开关|
-| 12 | 板载温度传感器 |24|电源接口|
-
-
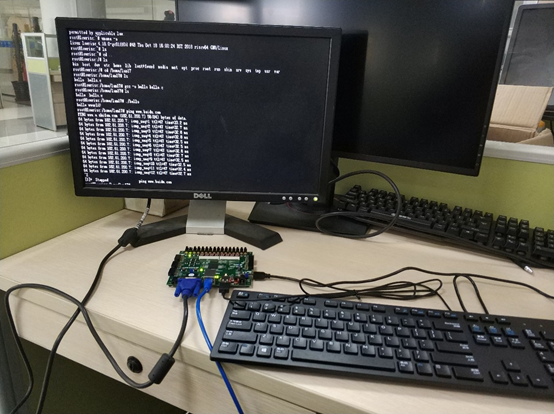
-## 验证FPGA 移植linux
-
-通过 lowRISC 开源项目,基于 rocket 修改的软核上运行完整的 linux。支持键盘、显示器、网卡等常见通用设备,验证了riscv软核运行linux操作系统的可行性,为XiUOS进一步支持riscv软核提供了试验基础。
-* 生成riscv软核比特流
-* 裁剪编译 linux
-* 生成伯克利 bootloader(bbl)
-* 将软核写入 flash
-* 将 bbl 和 linux 写入 microSD卡
-* JP1 位于 USB / SD 位置,JP2 位于 USB 位置,电源选择 JP3位,usb底部的开关打开DIP-SW 1,引导linux从sd卡启动
-
-
-
-| 序号 | 描述 | 序号 | 描述 |
-| ---- | ---- | ---- | ---- |
-| 1 | 选择供电跳线 |13|CPU复位按键(用于软核)|
-| 2 | UART/JTAG共用USB接口 |14|FPGA 配置复位按键|
-| 3 | 外部配置跳线柱(SD/USB) |15|模拟信号Pmod端口(XADC)|
-| 4 | Pmod端口 |16|编程模式跳线柱|
-| 5 | 扩音器 |17|音频连接口|
-| 6 | 电源测试点 |18|VGA连接口|
-| 7 | 16个LED |19|FPGA编程完成LED|
-| 8 | 16个按键开关 |20|以太网连接口|
-| 9 | 8位7段数码管 |21|USB连接口|
-| 10 | 可选用与外部接线的JTAG端口 |22|(工业用)PIC24编程端口|
-| 11 | 5个按键开关 |23|电源开关|
-| 12 | 板载温度传感器 |24|电源接口|
-
-
-## 验证FPGA 移植linux
-
-通过 lowRISC 开源项目,基于 rocket 修改的软核上运行完整的 linux。支持键盘、显示器、网卡等常见通用设备,验证了riscv软核运行linux操作系统的可行性,为XiUOS进一步支持riscv软核提供了试验基础。
-* 生成riscv软核比特流
-* 裁剪编译 linux
-* 生成伯克利 bootloader(bbl)
-* 将软核写入 flash
-* 将 bbl 和 linux 写入 microSD卡
-* JP1 位于 USB / SD 位置,JP2 位于 USB 位置,电源选择 JP3位,usb底部的开关打开DIP-SW 1,引导linux从sd卡启动
-
- -
-  -
-STM32F4DISCOVERY
- XiUOS最新分支支持stm32f407-st-discovery开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。 -1. Debug port
-2. Virtual Com port (with new order code only)
-3. Mass storage (with new order code only)
-+ Board power supply: through USB bus or from an external 5 V supply voltage -+ External application power supply: 3 V and 5 V -+ LIS302DL or LIS3DSH ST MEMS 3-axis accelerometer -+ MP45DT02 ST-MEMS audio sensor omni-directional digital microcontroller -+ CS43L22 audio DAC with integrated class D speaker driver -+ Eight LEDs: -1. LD1 (red/green) for USB communication
-2. LD2 (red) for 3.3 V power on
-3. Four user LEDs, LD3 (orange), LD4 (green), LD5 (red) and LD6 (blue)
-4. USB OTG LEDs LD7 (green) VBUS and LD8 (red) over-current
-+ Two push-buttons (user and reset) -+ USB OTG FS with micro-AB connector -+ Extension header for all LQFP100 I/Os for quick connection to prototyping board and easy probing -+ Comprehensive free software including a variety of examples, part of STM32CubeF4 package or STSW-STM32068 to use legacy standard libraries. - -### 更多信息 -+ [STM32F4DISCOVERY](https://www.st.com/content/st_com/en/products/evaluation-tools/product-evaluation-tools/mcu-mpu-eval-tools/stm32-mcu-mpu-eval-tools/stm32-discovery-kits/stm32f4discovery.html#) - -## 支持的功能 -| 名称 | 控制器 | 驱动描述 | -| ---- | ---- | ---- | -| -
-STM32F407ZET6
- XiUOS最新分支支持stm32f407zgt6开发板,该开发板作为一种标准的板子,支持各种上层组件和应用程序。 -1. Up to 1 Mbyte of Flash memory
-2. Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
-3. Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
-4. 512 bytes of OTP memory
-5. Flexible static memory controller supporting Compact Flash, SRAM, PSRAM, NOR and NAND memories
-+ LCD parallel interface, 8080/6800 modes -+ Clock, reset and supply management -1. 1.8 V to 3.6 V application supply and I/Os
-2. POR, PDR, PVD and BOR
-3. 4-to-26 MHz crystal oscillator
-4. Internal 16 MHz factory-trimmed RC (1% accuracy)
-5. 32 kHz oscillator for RTC with calibration
-6. Internal 32 kHz RC with calibration
-+ Low-power operation -1. Sleep, Stop and Standby modes
-2. VBAT supply for RTC, 20×32 bit backup registers + optional 4 KB backup SRAM
-+ 3×12-bit, 2.4 MSPS A/D converters: up to 24 channels and 7.2 MSPS in triple interleaved mode -+ 2×12-bit D/A converters -+ General-purpose DMA: 16-stream DMA controller with FIFOs and burst support -+ Up to 17 timers: up to twelve 16-bit and two 32-bit timers up to 168 MHz, each with up to 4 IC/OC/PWM or pulse counter and quadrature (incremental) encoder input -+ Debug mode -1. Serial wire debug (SWD) & JTAG interfaces
-2. Cortex-M4 Embedded Trace Macrocell™
-+ Up to 140 I/O ports with interrupt capability -1. Up to 136 fast I/Os up to 84 MHz
-2. Up to 138 5 V-tolerant I/Os
-+ Up to 15 communication interfaces -1. Up to 3 × I2C interfaces (SMBus/PMBus)
-2. Up to 4 USARTs/2 UARTs (10.5 Mbit/s, ISO 7816 interface, LIN, IrDA, modem control)
-3. Up to 3 SPIs (42 Mbits/s), 2 with muxed full-duplex I2S to achieve audio class accuracy via internal audio PLL or external clock
-4. 2 × CAN interfaces (2.0B Active)
-5. SDIO interface
-+ Advanced connectivity -1. USB 2.0 full-speed device/host/OTG controller with on-chip PHY
-2. USB 2.0 high-speed/full-speed device/host/OTG controller with dedicated DMA, on-chip full-speed PHY and ULPI
-3. 10/100 Ethernet MAC with dedicated DMA: supports IEEE 1588v2 hardware, MII/RMII
-+ 8- to 14-bit parallel camera interface up to 54 Mbytes/s -+ True random number generator -+ CRC calculation unit -+ 96-bit unique ID -+ RTC: subsecond accuracy, hardware calendar - - -### 更多信息 -+ [STM32F407ZET6](https://www.st.com/content/st_com/en/products/microcontrollers-microprocessors/stm32-32-bit-arm-cortex-mcus/stm32-high-performance-mcus/stm32f4-series/stm32f407-417/stm32f407ze.html) - -## 支持的功能 -| 名称 | 控制器 | 驱动描述 | -| ---- | ---- | ---- | -| -
-第二步,选择版本并下载安装包,此处下载的安装包版本为V6.72e,即JLink_Linux_V672e_x86_64.deb。
-
-
-
-第二步,选择版本并下载安装包,此处下载的安装包版本为V6.72e,即JLink_Linux_V672e_x86_64.deb。
-
- -
-第三步,安装JLink_Linux_V672e_x86_64.deb
-
-```shell
-$ dpkg -i JLink_Linux_V672e_x86_64.deb
-```
-
-+ openocd安装
-
-第一步,进入[下载网址](https://github.com/kendryte/openocd-kendryte/releases),
-下载Unbuntu版本的openocd。XiUOS中下载的kendryte-openocd-0.2.3-ubuntu64.tar.gz
-
-第二步,安装openocd
-
-```shell
-$ sudo mv kendryte-openocd-0.2.2-ubuntu64.tar.gz /opt
-$ cd /opt
-$ sudo tar -zxvf kendryte-openocd-0.2.2-ubuntu64.tar.gz
-$ sudo apt install libusb-dev libftdi-dev libhidapi-dev
-```
-
-
-
-第三步,openocd文件配置
-
-打开配置文件,修改第三行 jlink serial 504503073的504503073为具体JLINK设备的标签。
-
-```shell
-$ cd /opt/kendryte-openocd
-$ vim ctl/openocd.cfg
-```
-
-
-
-第三步,安装JLink_Linux_V672e_x86_64.deb
-
-```shell
-$ dpkg -i JLink_Linux_V672e_x86_64.deb
-```
-
-+ openocd安装
-
-第一步,进入[下载网址](https://github.com/kendryte/openocd-kendryte/releases),
-下载Unbuntu版本的openocd。XiUOS中下载的kendryte-openocd-0.2.3-ubuntu64.tar.gz
-
-第二步,安装openocd
-
-```shell
-$ sudo mv kendryte-openocd-0.2.2-ubuntu64.tar.gz /opt
-$ cd /opt
-$ sudo tar -zxvf kendryte-openocd-0.2.2-ubuntu64.tar.gz
-$ sudo apt install libusb-dev libftdi-dev libhidapi-dev
-```
-
-
-
-第三步,openocd文件配置
-
-打开配置文件,修改第三行 jlink serial 504503073的504503073为具体JLINK设备的标签。
-
-```shell
-$ cd /opt/kendryte-openocd
-$ vim ctl/openocd.cfg
-```
-
- -
-第四步,打开openocd软件
-
-```shell
-$ cd /opt/kendryte-openocd
-$ ./bin/openocd -f ./ctl/openocd.cfg
-```
-
-成功运行则显示如下的界面。
-
-
-
-第四步,打开openocd软件
-
-```shell
-$ cd /opt/kendryte-openocd
-$ ./bin/openocd -f ./ctl/openocd.cfg
-```
-
-成功运行则显示如下的界面。
-
- -
-
-### 调试程序
-
-```shell
-$ riscv-none-embed-gdb XiaoShan_kd233.elf --eval-command="target remote 127.0.0.1:3333"
-```
-
-运行上述命令,其中,
-+ XiaoShan_kd233.elf是编译过程生成的elf文件;
-+ 127.0.0.1表示本地IP地址,也可以制定远程地址;
-+ 3333是openocd监听的端口号;
-
-成功连接openocd之后,界面如下所示,之后就可以使用load\break\continue等gdb命令进行调试了。
-
-
-
-
-### 调试程序
-
-```shell
-$ riscv-none-embed-gdb XiaoShan_kd233.elf --eval-command="target remote 127.0.0.1:3333"
-```
-
-运行上述命令,其中,
-+ XiaoShan_kd233.elf是编译过程生成的elf文件;
-+ 127.0.0.1表示本地IP地址,也可以制定远程地址;
-+ 3333是openocd监听的端口号;
-
-成功连接openocd之后,界面如下所示,之后就可以使用load\break\continue等gdb命令进行调试了。
-
- -
- -
-提交到Ozone页面
-
-
-
-点击调试后,若未设置断点,Ozone将自动在执行main函数前停止,Ozone支持设置代码和数据断点、单步调试、查看变量值等功能,是很方便的一个调试工具。
-
-
-
-
-
-## FAQ
-
-
-
diff --git a/docs/doc/appdev/dev.md b/docs/doc/appdev/dev.md
deleted file mode 100755
index fe2e6fe..0000000
--- a/docs/doc/appdev/dev.md
+++ /dev/null
@@ -1,56 +0,0 @@
-# 开发步骤
-
-## 前言
-
-
-提交到Ozone页面
-
-
-
-点击调试后,若未设置断点,Ozone将自动在执行main函数前停止,Ozone支持设置代码和数据断点、单步调试、查看变量值等功能,是很方便的一个调试工具。
-
-
-
-
-
-## FAQ
-
-
-
diff --git a/docs/doc/appdev/dev.md b/docs/doc/appdev/dev.md
deleted file mode 100755
index fe2e6fe..0000000
--- a/docs/doc/appdev/dev.md
+++ /dev/null
@@ -1,56 +0,0 @@
-# 开发步骤
-
-## 前言
-本文档将介绍XiUOS分别在基于ARM和RISC-V架构的开发板上的编译、烧录和运行的过程。包括开发板选择及配置初始化、编译命令等信息。 -
- -## 开发板的选择及配置初始化 -在执行编译之前,我们需要先确定XiUOS系统要运行在哪个开发板上,然后针对具体的开发板设置相关的配置信息。
- -+ 开发板的选择 -为了查看XiUOS支持的开发板种类,可以执行以下命令,也可以[查看支持的开发板](/hardwaresupport/arm32/stm32f407-st-discovery.html)。 - - $ make BOARD=list -+ 配置初始化 - + 以stm32f407-st-discovery为例,进行开始系统参数。 - - - - - $ make BOARD=stm32f407-st-discovery menuconfig - - 对应的配置信息将存放在board/stm32f407-st-discovery/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
-
- + 以kd233为例,进行开始系统参数。
-
- $ make BOARD=KD233 menuconfig
-
-
- 对应的配置信息将存放在board/stm32f407-st-discovery/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
-
- + 以kd233为例,进行开始系统参数。
-
- $ make BOARD=KD233 menuconfig
-
- 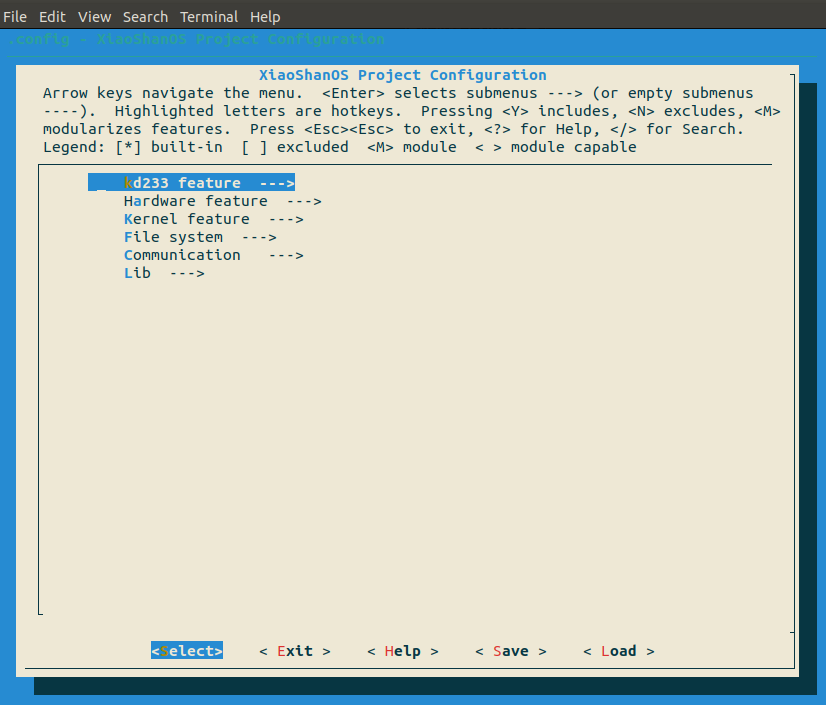 - 对应的配置信息将存放在board/kd233/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
-
-## 编译命令
- 通用编译命令, 默认为BOARD=KD233
-
- $ make [BOARD=<所选开发板>]
-+ 当 make 命令被执行时,它会扫描当前目录下Makefile或makefile文件找到目标以及其依赖。如果这些依赖自身也是目标,继续为这些依赖扫描Makefile 建立其依赖关系,然后编译它们。
-+ 创建build目录,目录下包含了各种目标文件、.bin、.elf等文件
- + 目标文件,以.o结尾的文件
- + .bin 二进制文件
- + .elf 可执行文件
-## 烧录命令
-+ 基于ARM开发板的烧录命令
-
- $ sudo st-flash write <生成的.elf文件> 0x8000000
-+ 基于RISC-V开发板的烧录命令
-
- $ sudo kflash <生成的.elf文件> -t
-
-## 运行界面
-+ XiUOS运行在ARM开发板
-
-
- 对应的配置信息将存放在board/kd233/xsconfig.h头文件中,文件中的选项均以XS_为前缀开头。
-
-## 编译命令
- 通用编译命令, 默认为BOARD=KD233
-
- $ make [BOARD=<所选开发板>]
-+ 当 make 命令被执行时,它会扫描当前目录下Makefile或makefile文件找到目标以及其依赖。如果这些依赖自身也是目标,继续为这些依赖扫描Makefile 建立其依赖关系,然后编译它们。
-+ 创建build目录,目录下包含了各种目标文件、.bin、.elf等文件
- + 目标文件,以.o结尾的文件
- + .bin 二进制文件
- + .elf 可执行文件
-## 烧录命令
-+ 基于ARM开发板的烧录命令
-
- $ sudo st-flash write <生成的.elf文件> 0x8000000
-+ 基于RISC-V开发板的烧录命令
-
- $ sudo kflash <生成的.elf文件> -t
-
-## 运行界面
-+ XiUOS运行在ARM开发板
-
- -
-+ XiUOS运行在RISC-V开发板
-
-
-+ XiUOS运行在RISC-V开发板
- -
-## FAQ
diff --git a/docs/doc/appdev/env.md b/docs/doc/appdev/env.md
deleted file mode 100755
index 57b4e8c..0000000
--- a/docs/doc/appdev/env.md
+++ /dev/null
@@ -1,80 +0,0 @@
-# 开发环境
-
-## 前言
-本文档将介绍如何在个人pc设备上构建编译环境来编译 XiUOS
-操作系统, 需要注意的是, 目前 XiUOS 暂时只支持在Linux系统上编译。
-
-## 硬件安装
-* 硬件要求
- 64位系统,磁盘空间大于40G。
-* linux内核下载
- 因为XiUOS是在Ubuntu 16.04上开发与测试的(Ubuntu 18.04、20.04版本也支持),因此我们推荐您使用Ubuntu 16.04版本的系统执行编译环境搭建。
-* Ubuntu下载网址
- [here](https://ubuntu.com/download/desktop)
-
-
-## 依赖包安装
-
-```shell
-$ sudo apt-get install gcc
-$ sudo apt-get install make
-$ sudo apt-get install libncurses5-dev
-$ sudo apt-get install openssl
-$ sudo apt-get install libssl-dev
-$ sudo apt-get install build-essential
-$ sudo apt-get install pkg-config
-$ sudo apt-get install libc6-dev
-$ sudo apt-get install bison
-$ sudo apt-get install flex
-$ sudo apt-get install libelf-dev
-$ sudo apt-get install autoconf
-$ sudo apt-get install libtool
-$ sudo apt-get install gpref
-```
-## 源码下载
- XiUOS的源码和相关文档介绍使用git进行集成管理,建议开发者使用git工具进行版本控制和分支管理
-
-git配置执行以下命令
-```shell
-$ git config --global user.name "your name"
-$ git config --global user.email "your email"
-```
-其中,源码下载网址点击该链接[XiUOS源码网址](https://ubuntu.com/download/desktop)
-
-## 工具链
-* ARM下编译需要安装arm-none-eabi编译工具, 安装到Ubuntu的默认路径/usr/bin/arm-none-eabi-,使用如下命令行下载
-
-```shell
-$ sudo apt-get install gcc-arm-none-eabi
-```
-
- * 源码下载,下载网址
-[ARM官网下载](https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-rm/downloads)
- RISC-V下编译需要安装riscv-none-embed-编译工具, 安装到Ubuntu的默认路径/opt/
- [下载网址](https://github.com/xpack-dev-tools/riscv-none-embed-gcc-xpack/releases/), 根据需求选择不同的版本
- 操作方法,以xpack-riscv-none-embed-gcc-linux-x64.tar.gz为例
-
-```shell
-$ tar -zxvf xpack-riscv-none-embed-gcc-linux-x64.tar.gz -C /opt/
-```
-## 烧写工具
-* ARM下烧写软件(ST-LINK)
- 下载源码
-
-```shell
-git clone https://github.com/texane/stlink.git
-```
-
-
-* RISC-V下烧写软件(KFLASH)
-
-```shell
-$ sudo pip3 install kflash
-// 如果在安装工具失败,则执行一下命令
-$ sudo python -m pip install kflash
-$ sudo python3 -m pip install kflash
-$ sudo pip install kflash
-$ sudo pip2 install kflash
-```
-
-## FAQ
diff --git a/docs/doc/appdev/imagesrc/device_config.png b/docs/doc/appdev/imagesrc/device_config.png
deleted file mode 100644
index b2605fe..0000000
Binary files a/docs/doc/appdev/imagesrc/device_config.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/elf_file.png b/docs/doc/appdev/imagesrc/elf_file.png
deleted file mode 100644
index 7673dcd..0000000
Binary files a/docs/doc/appdev/imagesrc/elf_file.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/interface_config.png b/docs/doc/appdev/imagesrc/interface_config.png
deleted file mode 100644
index e30b192..0000000
Binary files a/docs/doc/appdev/imagesrc/interface_config.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/jlink_package_1.png b/docs/doc/appdev/imagesrc/jlink_package_1.png
deleted file mode 100644
index 6b37774..0000000
Binary files a/docs/doc/appdev/imagesrc/jlink_package_1.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/jlink_package_2.png b/docs/doc/appdev/imagesrc/jlink_package_2.png
deleted file mode 100644
index 065afa4..0000000
Binary files a/docs/doc/appdev/imagesrc/jlink_package_2.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/open_openocd.png b/docs/doc/appdev/imagesrc/open_openocd.png
deleted file mode 100644
index c35d880..0000000
Binary files a/docs/doc/appdev/imagesrc/open_openocd.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/openocd_cfg.png b/docs/doc/appdev/imagesrc/openocd_cfg.png
deleted file mode 100644
index e1ca1b2..0000000
Binary files a/docs/doc/appdev/imagesrc/openocd_cfg.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/openocd_gdb.png b/docs/doc/appdev/imagesrc/openocd_gdb.png
deleted file mode 100644
index 6204fb0..0000000
Binary files a/docs/doc/appdev/imagesrc/openocd_gdb.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/ozone_install.png b/docs/doc/appdev/imagesrc/ozone_install.png
deleted file mode 100644
index c0a7cf3..0000000
Binary files a/docs/doc/appdev/imagesrc/ozone_install.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/ozone_page.png b/docs/doc/appdev/imagesrc/ozone_page.png
deleted file mode 100644
index d8858a0..0000000
Binary files a/docs/doc/appdev/imagesrc/ozone_page.png and /dev/null differ
diff --git a/docs/doc/appdev/start_from_scratch/README.md b/docs/doc/appdev/start_from_scratch/README.md
new file mode 100644
index 0000000..5d9d3f4
--- /dev/null
+++ b/docs/doc/appdev/start_from_scratch/README.md
@@ -0,0 +1,11 @@
+# 从零开始构建矽璓工业物联操作系统
+
+---
+
+## 使用ARM架构的开发板
+
+* [STM32F407-ST-DISCOVERY](/doc/appdev/start_from_scratch/stm32f407-st-discovery.md)
+
+## 使用risc-v架构的开发板
+
+* [KD233](/doc/appdev/start_from_scratch/kd233.md)
diff --git a/docs/doc/appdev/start_from_scratch/kd233.md b/docs/doc/appdev/start_from_scratch/kd233.md
new file mode 100644
index 0000000..896e156
--- /dev/null
+++ b/docs/doc/appdev/start_from_scratch/kd233.md
@@ -0,0 +1,198 @@
+# 从零开始构建矽璓工业物联操作系统:使用risc-v架构的kd233开发板
+
+[XiUOS](http://xuos.io/) (X Industrial Ubiquitous Operating System) 矽璓工业物联操作系统是一款面向工业物联场景的泛在操作系统,来自泛在操作系统研究计划。所谓泛在操作系统(UOS: Ubiquitous Operating Systems),是支持互联网时代人机物融合泛在计算应用模式的新型操作系统,是传统操作系统概念的泛化与延伸。在泛在操作系统技术体系中,不同的泛在计算设备和泛在应用场景需要符合各自特性的不同UOS,XiUOS即是面向工业物联场景的一种UOS,主要由一个极简的微型实时操作系统(RTOS)内核和其上的智能工业物联框架构成,支持工业物联网(IIoT: Industrial Internet of Things)应用。
+
+## 开发环境搭建
+
+### 推荐使用
+
+**操作系统:** ubuntu18.04[https://ubuntu.com/download/desktop](https://ubuntu.com/download/desktop)
+更新`ubuntu 18.04`源的方法:(根据自身情况而定,可以不更改)
+第一步:打开sources.list文件
+
+```bash
+sudo vim /etc/apt/sources.list
+```
+
+第二步:将以下内容复制到sources.list文件
+
+```
+deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
+```
+
+第三步:更新源和系统软件
+
+```bash
+sudo apt-get update
+sudo apt-get upgrade
+```
+
+**开发工具推荐使用 VSCode,VScode下载地址为:** VSCode [https://code.visualstudio.com/](https://code.visualstudio.com/),推荐下载地址为 [http://vscode.cdn.azure.cn/stable/3c4e3df9e89829dce27b7b5c24508306b151f30d/code_1.55.2-1618307277_amd64.deb](http://vscode.cdn.azure.cn/stable/3c4e3df9e89829dce27b7b5c24508306b151f30d/code_1.55.2-1618307277_amd64.deb)
+
+### 依赖包安装
+
+```bash
+sudo apt install build-essential pkg-config git
+sudo apt install gcc make libncurses5-dev openssl libssl-dev bison flex libelf-dev autoconf libtool gperf libc6-dev
+```
+
+**源码下载:** XiUOS [https://forgeplus.trustie.net/projects/xuos/xiuos](https://forgeplus.trustie.net/projects/xuos/xiuos)
+新建一个空文件夹并进入文件夹中,并下载源码,具体命令如下:
+
+```bash
+mkdir test && cd test
+git clone https://git.trustie.net/xuos/xiuos.git
+```
+
+打开源码文件包可以看到以下目录:
+| 名称 | 说明 |
+| -- | -- |
+| application | 应用代码 |
+| board | 板级支持包 |
+| framework | 应用框架 |
+| fs | 文件系统 |
+| kernel | 内核源码 |
+| resources | 驱动文件 |
+| tool | 系统工具 |
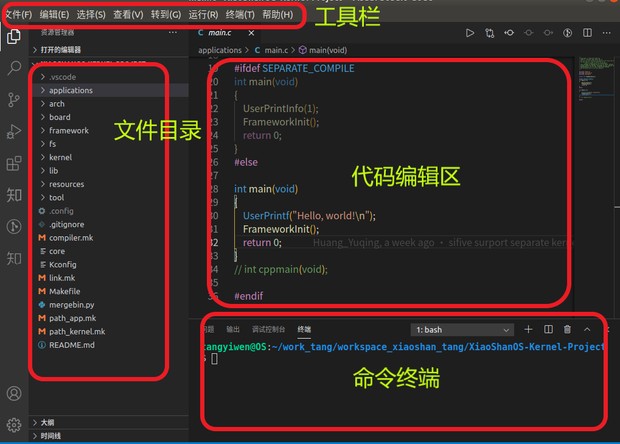
+使用VScode打开代码,具体操作步骤为:在源码文件夹下打开系统终端,输入`code .`即可打开VScode开发环境,如下图所示:
+
-
-## FAQ
diff --git a/docs/doc/appdev/env.md b/docs/doc/appdev/env.md
deleted file mode 100755
index 57b4e8c..0000000
--- a/docs/doc/appdev/env.md
+++ /dev/null
@@ -1,80 +0,0 @@
-# 开发环境
-
-## 前言
-本文档将介绍如何在个人pc设备上构建编译环境来编译 XiUOS
-操作系统, 需要注意的是, 目前 XiUOS 暂时只支持在Linux系统上编译。
-
-## 硬件安装
-* 硬件要求
- 64位系统,磁盘空间大于40G。
-* linux内核下载
- 因为XiUOS是在Ubuntu 16.04上开发与测试的(Ubuntu 18.04、20.04版本也支持),因此我们推荐您使用Ubuntu 16.04版本的系统执行编译环境搭建。
-* Ubuntu下载网址
- [here](https://ubuntu.com/download/desktop)
-
-
-## 依赖包安装
-
-```shell
-$ sudo apt-get install gcc
-$ sudo apt-get install make
-$ sudo apt-get install libncurses5-dev
-$ sudo apt-get install openssl
-$ sudo apt-get install libssl-dev
-$ sudo apt-get install build-essential
-$ sudo apt-get install pkg-config
-$ sudo apt-get install libc6-dev
-$ sudo apt-get install bison
-$ sudo apt-get install flex
-$ sudo apt-get install libelf-dev
-$ sudo apt-get install autoconf
-$ sudo apt-get install libtool
-$ sudo apt-get install gpref
-```
-## 源码下载
- XiUOS的源码和相关文档介绍使用git进行集成管理,建议开发者使用git工具进行版本控制和分支管理
-
-git配置执行以下命令
-```shell
-$ git config --global user.name "your name"
-$ git config --global user.email "your email"
-```
-其中,源码下载网址点击该链接[XiUOS源码网址](https://ubuntu.com/download/desktop)
-
-## 工具链
-* ARM下编译需要安装arm-none-eabi编译工具, 安装到Ubuntu的默认路径/usr/bin/arm-none-eabi-,使用如下命令行下载
-
-```shell
-$ sudo apt-get install gcc-arm-none-eabi
-```
-
- * 源码下载,下载网址
-[ARM官网下载](https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-rm/downloads)
- RISC-V下编译需要安装riscv-none-embed-编译工具, 安装到Ubuntu的默认路径/opt/
- [下载网址](https://github.com/xpack-dev-tools/riscv-none-embed-gcc-xpack/releases/), 根据需求选择不同的版本
- 操作方法,以xpack-riscv-none-embed-gcc-linux-x64.tar.gz为例
-
-```shell
-$ tar -zxvf xpack-riscv-none-embed-gcc-linux-x64.tar.gz -C /opt/
-```
-## 烧写工具
-* ARM下烧写软件(ST-LINK)
- 下载源码
-
-```shell
-git clone https://github.com/texane/stlink.git
-```
-
-
-* RISC-V下烧写软件(KFLASH)
-
-```shell
-$ sudo pip3 install kflash
-// 如果在安装工具失败,则执行一下命令
-$ sudo python -m pip install kflash
-$ sudo python3 -m pip install kflash
-$ sudo pip install kflash
-$ sudo pip2 install kflash
-```
-
-## FAQ
diff --git a/docs/doc/appdev/imagesrc/device_config.png b/docs/doc/appdev/imagesrc/device_config.png
deleted file mode 100644
index b2605fe..0000000
Binary files a/docs/doc/appdev/imagesrc/device_config.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/elf_file.png b/docs/doc/appdev/imagesrc/elf_file.png
deleted file mode 100644
index 7673dcd..0000000
Binary files a/docs/doc/appdev/imagesrc/elf_file.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/interface_config.png b/docs/doc/appdev/imagesrc/interface_config.png
deleted file mode 100644
index e30b192..0000000
Binary files a/docs/doc/appdev/imagesrc/interface_config.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/jlink_package_1.png b/docs/doc/appdev/imagesrc/jlink_package_1.png
deleted file mode 100644
index 6b37774..0000000
Binary files a/docs/doc/appdev/imagesrc/jlink_package_1.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/jlink_package_2.png b/docs/doc/appdev/imagesrc/jlink_package_2.png
deleted file mode 100644
index 065afa4..0000000
Binary files a/docs/doc/appdev/imagesrc/jlink_package_2.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/open_openocd.png b/docs/doc/appdev/imagesrc/open_openocd.png
deleted file mode 100644
index c35d880..0000000
Binary files a/docs/doc/appdev/imagesrc/open_openocd.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/openocd_cfg.png b/docs/doc/appdev/imagesrc/openocd_cfg.png
deleted file mode 100644
index e1ca1b2..0000000
Binary files a/docs/doc/appdev/imagesrc/openocd_cfg.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/openocd_gdb.png b/docs/doc/appdev/imagesrc/openocd_gdb.png
deleted file mode 100644
index 6204fb0..0000000
Binary files a/docs/doc/appdev/imagesrc/openocd_gdb.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/ozone_install.png b/docs/doc/appdev/imagesrc/ozone_install.png
deleted file mode 100644
index c0a7cf3..0000000
Binary files a/docs/doc/appdev/imagesrc/ozone_install.png and /dev/null differ
diff --git a/docs/doc/appdev/imagesrc/ozone_page.png b/docs/doc/appdev/imagesrc/ozone_page.png
deleted file mode 100644
index d8858a0..0000000
Binary files a/docs/doc/appdev/imagesrc/ozone_page.png and /dev/null differ
diff --git a/docs/doc/appdev/start_from_scratch/README.md b/docs/doc/appdev/start_from_scratch/README.md
new file mode 100644
index 0000000..5d9d3f4
--- /dev/null
+++ b/docs/doc/appdev/start_from_scratch/README.md
@@ -0,0 +1,11 @@
+# 从零开始构建矽璓工业物联操作系统
+
+---
+
+## 使用ARM架构的开发板
+
+* [STM32F407-ST-DISCOVERY](/doc/appdev/start_from_scratch/stm32f407-st-discovery.md)
+
+## 使用risc-v架构的开发板
+
+* [KD233](/doc/appdev/start_from_scratch/kd233.md)
diff --git a/docs/doc/appdev/start_from_scratch/kd233.md b/docs/doc/appdev/start_from_scratch/kd233.md
new file mode 100644
index 0000000..896e156
--- /dev/null
+++ b/docs/doc/appdev/start_from_scratch/kd233.md
@@ -0,0 +1,198 @@
+# 从零开始构建矽璓工业物联操作系统:使用risc-v架构的kd233开发板
+
+[XiUOS](http://xuos.io/) (X Industrial Ubiquitous Operating System) 矽璓工业物联操作系统是一款面向工业物联场景的泛在操作系统,来自泛在操作系统研究计划。所谓泛在操作系统(UOS: Ubiquitous Operating Systems),是支持互联网时代人机物融合泛在计算应用模式的新型操作系统,是传统操作系统概念的泛化与延伸。在泛在操作系统技术体系中,不同的泛在计算设备和泛在应用场景需要符合各自特性的不同UOS,XiUOS即是面向工业物联场景的一种UOS,主要由一个极简的微型实时操作系统(RTOS)内核和其上的智能工业物联框架构成,支持工业物联网(IIoT: Industrial Internet of Things)应用。
+
+## 开发环境搭建
+
+### 推荐使用
+
+**操作系统:** ubuntu18.04[https://ubuntu.com/download/desktop](https://ubuntu.com/download/desktop)
+更新`ubuntu 18.04`源的方法:(根据自身情况而定,可以不更改)
+第一步:打开sources.list文件
+
+```bash
+sudo vim /etc/apt/sources.list
+```
+
+第二步:将以下内容复制到sources.list文件
+
+```
+deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
+deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
+deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
+```
+
+第三步:更新源和系统软件
+
+```bash
+sudo apt-get update
+sudo apt-get upgrade
+```
+
+**开发工具推荐使用 VSCode,VScode下载地址为:** VSCode [https://code.visualstudio.com/](https://code.visualstudio.com/),推荐下载地址为 [http://vscode.cdn.azure.cn/stable/3c4e3df9e89829dce27b7b5c24508306b151f30d/code_1.55.2-1618307277_amd64.deb](http://vscode.cdn.azure.cn/stable/3c4e3df9e89829dce27b7b5c24508306b151f30d/code_1.55.2-1618307277_amd64.deb)
+
+### 依赖包安装
+
+```bash
+sudo apt install build-essential pkg-config git
+sudo apt install gcc make libncurses5-dev openssl libssl-dev bison flex libelf-dev autoconf libtool gperf libc6-dev
+```
+
+**源码下载:** XiUOS [https://forgeplus.trustie.net/projects/xuos/xiuos](https://forgeplus.trustie.net/projects/xuos/xiuos)
+新建一个空文件夹并进入文件夹中,并下载源码,具体命令如下:
+
+```bash
+mkdir test && cd test
+git clone https://git.trustie.net/xuos/xiuos.git
+```
+
+打开源码文件包可以看到以下目录:
+| 名称 | 说明 |
+| -- | -- |
+| application | 应用代码 |
+| board | 板级支持包 |
+| framework | 应用框架 |
+| fs | 文件系统 |
+| kernel | 内核源码 |
+| resources | 驱动文件 |
+| tool | 系统工具 |
+使用VScode打开代码,具体操作步骤为:在源码文件夹下打开系统终端,输入`code .`即可打开VScode开发环境,如下图所示:
+ +
+
+
+  ## 关键数据结构
-* struct xs_Bus结构
+* struct Bus结构
```c
-struct xs_Bus {
- char Bus_name[XS_NAME_MAX]; /* name of bus */
- enum xs_BusType type; /* type of bus */
- enum xs_BUSSTATE flag;
- list_head device;
- list_head driver;
- int (*match)(const struct xs_DeviceDriver * drv,const struct xs_Device dev);
- int (*probe)(void * bus);
- int (*remove)(void * bus);
- int (*shutdown)(void * bus);
- int (*resume)(void * bus);
+struct Bus
+{
+ int8 bus_name[NAME_NUM_MAX];
+ enum BusType bus_type;
+ enum BusState bus_state;
- int (bus_register)(void * bus);
- int (bus_unregister)(void * bus);
- void * private_data;
-};
-```
-Bus_name成员是一个可读的名字,用于唯一标识一个xs_Bus结构,
-type成员表示该xs_Bus为什么类型的总线,用一个枚举变量表示。
-```c
-enum xs_BusType {
- XS_IIC_BUS = 0, /* IIC */
- XS_SPI_BUS, /* SPI */
- XS_USB_BUS, /* USB */
- XS_CAN_BUS, /* CAN */
- /* ...... */
- XS_BUS_END,
-};
-```
-xs_BusType成员表示不同的总线类型,其具体定义在上文给出。
+ int32 (*match)(struct Driver *driver, struct HardwareDev *device);
+ int bus_lock;
-* enum Bus_priority枚举结构
-```c
-enum Bus_priority{
- PriorityLevelOne = 1,
- PriorityLevelTwo,
- PriorityLevelThree,
- PriorityLevelforth,
- PriorityLevelFive,
- PriorityLevelSix,
- PriorityLevelSeven
-};
-```
-Bus_priority变量表示总线优先级,数值越低优先级越高
-
-
-* struct xs_IIC_bus结构
-```c
-struct xs_I2CBus {
- struct xs_Bus bus; /* Basic properties of the bus */
- unsigned int speed; /* IIC communication rate*/
-};
-```
-speed成员记录I2C总线与传感器设备通信的速率
-
-* struct xs_SPIBus结构
-```c
-struct xs_SPIBus {
- struct xs_Bus bus; /* Basic properties of the bus */
- enum Bus_priority priority /* Bus priority */
- unsigned char CPHA; /* SPI clock phase*/
- unsigned char CPOL; /* SPI clock polarity*/
-};
-```
-CPHA成员记录SPI总线的时钟相位,CPOL成员记录SPI总线的时钟极性
-
-* struct xs_CANBus结构
-```c
-struct xs_CAN_bus {
- struct xs_Bus bus; /* Basic properties of the bus */
- enum Bus_priority priority /* Bus priority */
- unsigned int speed; /* CAN communication rate*/
-};
-```
-
-* struct xs_USBBus结构
-```c
-struct xs_USB_bus {
- struct xs_Bus bus; /* Basic properties of the bus */
- enum Bus_priority priority /* Bus priority */
- unsigned int speed; /* USB communication rate*/
-};
-```
-
-
-* struct xs_Device结构
-```c
-typedef struct xs_Device {
- char dev_name[XS_NAME_MAX]; /* name of device */
- enum xs_DeviceType type;
- struct mutex mut; /* Mutually Exclusive Semaphore*/
- xs_uint32 ref_count; /* the number of open */
- void * driver; /* Mounted driver*/
- struct device_ops ops; /* Device operation function set */
- struct xs_Device * prev;
- struct xs_Device * next;
- void * data;
- };
-};
-typedef struct xs_Device * xs_DevicePointer ;
-```
-
-
-
-* struct device_ops结构
-```c
- struct device_ops{
- int (*init)(struct xs_Device * dev);
- int (*open)(struct xs_Device * dev);
- int (*close)(struct xs_Device * dev);
- int (*read)(struct xs_Device * dev, void * buf, int unm);
- int (*write)(struct xs_Device * dev, void *buf, int num);
- int (*ioctl)(struct xs_Device * dev, int cmd);
- }
-```
-device_ops包含统一的、类似文件系统的API,用于对具体外设进行实际的数据读写。如在使用一个传感器前后需要打开(open)/关闭(close)该传感器,read、write分别用与从传感器接收数据与向传感器发送数据,ioctl用于配置传感器属性(如波特率)
-
-* struct xs_HardwareDev结构
-```c
-struct xs_HardwareDev{
- struct xs_Device dev;
- struct device_ops ops;
-
- int (*probe)(struct xs_Device * dev);
- int (*remove)(struct xs_Device * dev);
- void (*shutdown)(struct xs_Device * dev);
- int (*suspend)(struct xs_Device * dev, int state);
- int (*resume)(struct xs_Device * dev);
-};
-```
-
-* struct IICHardwareDevice结构
-```c
- struct IICHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short IIC_addr;
- void * PrivData;
- }
-```
-
-* struct SPIHardwareDevice结构
-```c
- struct SPIHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short SPI_addr;
- void * PrivData;
- }
-```
-
-* struct CANHardwareDevice结构
-```c
- struct CANHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short CAN_addr;
- void * PrivData;
- }
-```
-
-* struct USBHardwareDevice结构
-```c
- struct USBHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short USB_addr;
- void * PrivData;
- }
-```
-
-
-* struct xs_DeviceDriver结构
- ```c
-struct xs_DeviceDriver{
- char driver_name[XS_NAME_MAX];
- struct bus_type * bus;
- enum driver_state falg;
+ struct HardwareDev *owner_haldev;
+ struct Driver *owner_driver;
- int (*add)(struct xs_DeviceDriver *dev);
- int (*remove)(struct xs_DeviceDriver *dev);
- int (*probe)(struct xs_HardwareDev *dev);
- void (*shutdown)(struct xs_HardwareDev *dev);
- struct list_drv{
- struct xs_DeviceDriver * prev;
- struct xs_DeviceDriver * next;
- void * data;
- };
-} Device_driver_head;
- ```
+ void *private_data;
+ /*manage the drv of the bus*/
+ uint8 driver_cnt;
+ uint8 bus_drvlink_flag;
+ DoubleLinklistType bus_drvlink;
+
+ /*manage the dev of the bus*/
+ uint8 haldev_cnt;
+ uint8 bus_devlink_flag;
+ DoubleLinklistType bus_devlink;
+
+ uint8 bus_cnt;
+ uint8 bus_link_flag;
+ DoubleLinklistType bus_link;
+};
+```
+* enum BusType枚举结构
+```c
+enum BusType
+{
+ TYPE_I2C_BUS = 0,
+ TYPE_SPI_BUS,
+ TYPE_HWTIMER_BUS,
+ TYPE_USB_BUS,
+ TYPE_CAN_BUS,
+ TYPE_WDT_BUS,
+ TYPE_SDIO_BUS,
+ TYPE_TOUCH_BUS,
+ TYPE_LCD_BUS,
+ TYPE_PIN_BUS,
+ TYPE_RTC_BUS,
+ TYPE_SERIAL_BUS,
+ TYPE_BUS_END,
+};
+```
+
+* enum BusState枚举结构
+```c
+enum BusState
+{
+ BUS_INIT = 0,
+ BUS_INSTALL,
+ BUS_UNINSTALL,
+};
+```
+* struct HardwareDev结构
+```c
+struct HardwareDev
+{
+ int8 dev_name[NAME_NUM_MAX];
+ enum DevType dev_type;
+ enum DevState dev_state;
+
+ const struct HalDevDone *dev_done;
+
+ int (*dev_recv_callback) (void *dev, x_size_t length);
+ int (*dev_block_control) (struct HardwareDev *dev, struct HalDevBlockParam *block_param);
+
+ struct Bus *owner_bus;
+ void *private_data;
+
+ int32 dev_sem;
+
+ DoubleLinklistType dev_link;
+};
+```
+* struct HalDevDone结构
+```c
+struct HalDevDone
+{
+ uint32 (*open) (void *dev);
+ uint32 (*close) (void *dev);
+ uint32 (*write) (void *dev, struct BusBlockWriteParam *write_param);
+ uint32 (*read) (void *dev, struct BusBlockReadParam *read_param);
+};
+```
+HalDevDone包含统一的、类似文件系统的API,用于对具体外设进行实际的开关和数据读写。如在使用一个外设前后需要打开(open)/关闭(close)该外设,read、write分别用与从外设接收数据与向外设发送数据。
+* struct Driver结构
+ ```c
+struct Driver
+{
+ int8 drv_name[NAME_NUM_MAX];
+ enum DriverType driver_type;
+ enum DriverState driver_state;
+
+ uint32 (*configure)(void *drv, struct BusConfigureInfo *configure_info);
+
+ struct Bus *owner_bus;
+ void *private_data;
+
+ DoubleLinklistType driver_link;
+};
+```
+回调函数configure用于对具体外设进行实际的配置。
## 使用场景
-在获取i2c数据前,要匹配设备驱动,在设备驱动打开后对设备进行读写。使用完毕后,关闭设备驱动。
+在获取外设数据前,要先获取外设bus,匹配driver和device数据结构,若有需要应配置外设driver,在外设device打开后对外设进行读写,使用完毕后,关闭设备。
-完整的使用过程示例如下:
+以SERIAL为例,完整的使用过程示例如下:
```c
int main(int argc, char *argv[])
{
- int ret;
- struct xs_I2cDevice *dev;
+ int ret = EOK;
+ char test_str[] = "Hello AIIT!\r\n";
- /* find the i2c device instance */
- dev = (struct xs_I2cDevice*)xs_DeviceFind("i2c_temp",XS_IIC_BUS); //获取设备句柄
- if(dev == NULL)
- {
- xs_kprintf("find iic device error\n");
+ struct Bus *bus;
+ struct HardwareDev *dev;
+ struct Driver *drv;
+
+ /* find the serial bus pointer */
+ bus = BusFind(SERIAL_BUS_NAME);
+ if (NONE == bus) {
+ KPrintf("BusFind %s failed\n", SERIAL_BUS_NAME);
+ return ERROR;
+ }
+
+ /* find the serial driver pointer */
+ drv = BusFindDriver(bus, SERIAL_DRV_NAME);
+ if (NONE == drv) {
+ KPrintf("BusFindDriver %s failed\n", SERIAL_DRV_NAME);
+ return ERROR;
+ }
+
+ /* find the serial device pointer */
+ dev = BusFindDevice(bus, SERIAL_DEVICE_NAME);
+ if (NONE == dev) {
+ KPrintf("BusFindDevice %s failed\n", SERIAL_DEVICE_NAME);
+ return ERROR;
}
- /* open the device instance */
- ret = xs_DeviceOpen(dev); //打开设备
- XS_ASSERT(ret == XS_EOK);
+ /*step 1: init bus_driver, change struct SerialCfgParam if necessary*/
+ struct SerialCfgParam serial_cfg;
+ memset(&serial_cfg, 0, sizeof(struct SerialCfgParam));
+ configure_info.configure_cmd = OPE_INT;
+ configure_info.private_data = &serial_cfg;
+ ret = BusDrvConfigure(drv, &configure_info);
+ if (EOK != ret) {
+ KPrintf("BusDrvConfigure OPE_INT failed error code %d\n", ret);
+ return ret;
+ }
- /* read temperature sensor data for 5 times */
- for (int i = 0; i < 5; i++)
- xs_kprintf("Current CO2 concentration is %u ppm\n", xs_DeviceRead(dev)); //读取设备数据
- xs_DeviceClose(dev); //关闭数据
+ /*step 2: match serial bus_driver with bus_device*/
+ bus->match(drv, dev);
- return 0;
+ /*step 3: open bus_device, configure struct SerialDevParam if necessary*/
+ serial_dev_param->serial_set_mode = SIGN_OPER_INT_RX;
+ serial_dev_param->serial_stream_mode = SIGN_OPER_STREAM;
+ ret = BusDevOpen(dev);
+ if (EOK != ret) {
+ KPrintf("BusDevOpen failed error code %d\n", ret);
+ return ret;
+ }
+
+ /*step 4: write serial data, configure struct BusBlockWriteParam*/
+ struct BusBlockWriteParam write_param;
+ write_param.pos = 0;
+ write_param.buffer = (void *)test_str;
+ write_param.size = sizeof(test_str) - 1;
+ BusDevWriteData(bus_device, &write_param);
+
+ /*step 5: close bus_device*/
+ BusDevClose(bus_device);
+
+ return EOK;
}
```
-
-
-
## 函数接口
-### 设备初始化函数
+* BUS注册函数
```c
/**
- * This function will initialize the specified device
- *
- * @param dev the pointer of device driver structure
- *
- * @return the result
- */
-xs_err_t xs_DeviceInit(xs_DevicePointer dev)
-{
- xs_err_t result = XS_EOK;
-
- XS_ASSERT(dev != XS_NULL);
-
- /*driver init*/
- if(dev->driver && dev->driver->flag & DRIVER_FLAG_MOUNTED){
- device_register(dev)
- if (!(dev->flag & DEVICE_FLAG_ACTIVATED))
- {
- result = device_init(dev);/* Macro */
- if (result != XS_EOK)
- {
- xs_kprintf("Initialize device:%s failed. The error code is %d\n",
- dev->name, result);
- }
- else
- {
- dev->flag |= XS_DEVICE_FLAG_ACTIVATED;
- }
- }
-
- }else{
- return DRIVER_ERROR;
- }
-
- return result;
-}
-```
-
-### 设备查找函数
-
-```c
-/**
- * This function finds a device driver by specified name.
- */
-xs_DevicePointer xs_DeviceFind(const char *name)
-{
- enum xs_BusType e;
- xs_DevicePointer dev;
- for(e=0;e !=XS_BUS_END; ++e){
- if(dev = __xs_DeviceFind_by_type(name,e) && dev !=BUS_ERROR)
- return dev;
- }
- return NULL;
-}
-
-xs_DevicePointer xs_DeviceFind(const char *name,enum xs_BusType bus_type){
- return __xs_DeviceFind_by_type(name,bus_type);
-};
-
-xs_DevicePointer __xs_DeviceFind_by_type(const char *name,enum xs_BusType bus_type)
-{
- struct xs_Device *device;
- struct xs_ListNode *node;
-
- xs_Bus bus = get_bus_from_type(bus_type);
- if(!(bus && bus->falg = BUS_FLAG_ACTIVED))
- return BUS_ERROR;/*a point to speical area */
-
- /* enter critical */
- if (xs_get_kthread_descriptor() != XS_NULL)
- xs_critical_enter();
-
- /* try to find device */
- for (node = bus->device.next;
- node != &(bus->device);
- node = node->next)
- {
- device = xs_list_entry(node, struct xs_Device, list);
- if (xs_strncmp(device->name, name, XS_NAME_MAX) == 0)
- {
- /* leave critical */
- if (xs_get_kthread_descriptor() != XS_NULL)
- xs_critical_exit();
-
- return (xs_DevicePointer)device;
- }
- }
-
- /* leave critical */
- if (xs_get_kthread_descriptor() != XS_NULL)
- xs_critical_exit();
-
- /* not found */
- return XS_NULL;
-}
-
-```
-### 设备打开函数
-```c
-
-/*
-* This function open a device
+* @Description: support to register bus pointer with linklist
+* @param bus - bus pointer
+* @return successful:EOK,failed:NONE
*/
-xs_err_t xs_DeviceOpen(xs_DevicePointer dev)
+int BusRegister(struct Bus *bus)
{
- xs_err_t result = XS_EOK;
+ x_err_t ret = EOK;
+ NULL_PARAM_CHECK(bus);
- XS_ASSERT(dev != XS_NULL);
- if(!(dev->bus))
- return BUS_ERROR;
- if(!(dev->driver && dev->bus->match(dev->driver,dev)))
- return DRIVER_ERROR;
+ bus->match = BusMatchDrvDev;
- /* if device is not initialized, initialize it. */
- if (!(dev->flag & DEVICE_FLAG_ACTIVATED))
- {
- xs_DeviceInit(dev);
- }
+ BusLinkInit(bus);
- /* call device_open interface */
- if (device_open != XS_NULL)
- {
- result = device_open(dev, oflag);
- dev->ref_count++;
- XS_ASSERT(dev->ref_count != 0);
- }
- return result;
-}
-```
-### 设备关闭函数
+ bus->bus_lock = KMutexCreate();
-```c
-xs_err_t xs_DeviceClose(xs_DevicePointer dev)
-{
- xs_err_t result = XS_EOK;
+ DoubleLinkListInsertNodeAfter(&bus_linklist, &(bus->bus_link));
- XS_ASSERT(dev != XS_NULL);
-
- if (dev->ref_count == 0)
- return XS_ERROR;
-
- dev->ref_count--;
-
- if (dev->ref_count != 0)
- return XS_EOK;
-
- /* call device_close interface */
- if (device_close != XS_NULL)
- {
- result = device_close(dev);
-
- }
-
-
- return result;
+ return ret;
}
```
-
-
-## i2c设备注册与卸载
+* BUS删除函数
```c
-int int xs_I2cDeviceRegister(struct xs_I2cDevice *dev,const char *name, xs_uint16 flags);
-int xs_I2cDeviceunRegister(struct xs_I2cDevice *dev);
+/**
+* @Description: support to unregister bus pointer and delete its linklist node
+* @param bus - bus pointer
+* @return successful:EOK,failed:NONE
+*/
+int BusUnregister(struct Bus *bus)
+{
+ NULL_PARAM_CHECK(bus);
+ bus->bus_cnt--;
+
+ DoubleLinkListRmNode(&(bus->bus_link));
+
+ return EOK;
+}
```
-### xs_I2cDeviceRegister函数具体实现
+* DRIVER注册到BUS函数
```c
-int xs_I2cDeviceRegister(struct xs_I2cDevice *dev,const char *name, xs_uint16 flags)
+/**
+* @Description: support to register driver pointer to bus pointer
+* @param bus - bus pointer
+* @param driver - driver pointer
+* @return successful:EOK,failed:NONE
+*/
+int DriverRegisterToBus(struct Bus *bus, struct Driver *driver)
{
- if(dev != NULL)
- {
- return xs_DeviceRegister(dev,name,0);
- }
- return -XS_ERROR;
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(driver);
+
+ driver->owner_bus = bus;
+ bus->driver_cnt++;
+
+ DoubleLinkListInsertNodeAfter(&bus->bus_drvlink, &(driver->driver_link));
+
+ return EOK;
}
+```
-xs_err_t xs_DeviceRegister(void * dev,const char *name, xs_uint16 flags)
+* DRIVER从BUS中删除函数
+```c
+/**
+* @Description: support to delete driver pointer from bus pointer
+* @param bus - bus pointer
+* @param driver - driver pointer
+* @return successful:EOK,failed:NONE
+*/
+int DriverDeleteFromBus(struct Bus *bus, struct Driver *driver)
{
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(driver);
- if (dev == XS_NULL)
- return -XS_ERROR;
+ bus->driver_cnt--;
- if (xs_DeviceFind(name) != XS_NULL)
- return -XS_ERROR;
+ DoubleLinkListRmNode(&(driver->driver_link));
- xs_CriticalEnter();
- for (node = Device_driver_head.NodeNext;
- node != &(xiaoshan_device_head);
- node = node->NodeNext)
+ free(driver);
+
+ return EOK;
+}
+```
+
+* DEVICE注册到BUS函数
+```c
+/**
+* @Description: support to register dev pointer to bus pointer
+* @param bus - bus pointer
+* @param device - device pointer
+* @return successful:EOK,failed:NONE
+*/
+int DeviceRegisterToBus(struct Bus *bus, struct HardwareDev *device)
+{
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(device);
+
+ device->owner_bus = bus;
+ bus->haldev_cnt++;
+
+ DoubleLinkListInsertNodeAfter(&bus->bus_devlink, &(device->dev_link));
+
+ return EOK;
+}
+```
+
+* DEVICE从BUS中删除函数
+```c
+/**
+* @Description: support to delete dev pointer from bus pointer
+* @param bus - bus pointer
+* @param device - device pointer
+* @return successful:EOK,failed:NONE
+*/
+int DeviceDeleteFromBus(struct Bus *bus, struct HardwareDev *device)
+{
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(device);
+
+ bus->haldev_cnt--;
+
+ DoubleLinkListRmNode(&(device->dev_link));
+
+ free(device);
+
+ return EOK;
+}
+```
+
+* 查找BUS函数
+```c
+/**
+* @Description: support to find bus pointer by bus name
+* @param bus_name - bus name
+* @return successful:bus pointer,failed:NONE
+*/
+BusType BusFind(const char *bus_name)
+{
+ struct Bus *bus = NONE;
+
+ DoubleLinklistType *node = NONE;
+ DoubleLinklistType *head = &bus_linklist;
+
+ for (node = head->node_next; node != head; node = node->node_next)
{
- struct xs_Device *device;
-
- device = XS_DOUBLE_LINKLIST_ENTRY(node, struct xs_Device, link);
- if (device)
- {
- XS_ASSERT(device != dev);
+ bus = SYS_DOUBLE_LINKLIST_ENTRY(node, struct Bus, bus_link);
+ if(!strcmp(bus->bus_name, bus_name)) {
+ return bus;
}
}
- xs_CriticalExit();
- xs_strncpy(dev->dev_string, name, XS_NAME_MAX);
- register xs_base temp = xs_DisableHwInterrupt();
- {
- xs_DoubleLinkListInsertNodeAfter(&xiaoshan_device_head, &(dev->link));
- }
- xs_EnableHwInterrupt(temp);
- dev->sign = flags;
- dev->call_cnt = 0;
- dev->status = 0;
- xs_InitWqueue(&(dev->wait_queue));
- return XS_EOK;
+
+ KPrintf("BusFind cannot find the %s bus.return NULL\n", bus_name);
+ return NONE;
}
```
+
+* 查找DRIVER函数
+```c
+/**
+* @Description: support to find driver pointer of certain bus by driver name
+* @param bus - bus pointer
+* @param driver_name - driver name
+* @return successful:EOK,failed:NONE
+*/
+DriverType BusFindDriver(struct Bus *bus, const char *driver_name)
+{
+ NULL_PARAM_CHECK(bus);
+ struct Driver *driver = NONE;
+
+ DoubleLinklistType *node = NONE;
+ DoubleLinklistType *head = &bus->bus_drvlink;
+
+ for (node = head->node_next; node != head; node = node->node_next)
+ {
+ driver = SYS_DOUBLE_LINKLIST_ENTRY(node, struct Driver, driver_link);
+ if(!strcmp(driver->drv_name, driver_name)) {
+ return driver;
+ }
+ }
+
+ KPrintf("BusFindDriver cannot find the %s driver.return NULL\n", driver_name);
+ return NONE;
+}
+```
+
+* 查找DEVICE函数
+```c
+/**
+* @Description: support to find device pointer of certain bus by device name
+* @param bus - bus pointer
+* @param device_name - device name
+* @return successful:EOK,failed:NONE
+*/
+HardwareDevType BusFindDevice(struct Bus *bus, const char *device_name)
+{
+ NULL_PARAM_CHECK(bus);
+ struct HardwareDev *device = NONE;
+
+ DoubleLinklistType *node = NONE;
+ DoubleLinklistType *head = &bus->bus_devlink;
+
+ for (node = head->node_next; node != head; node = node->node_next)
+ {
+ device = SYS_DOUBLE_LINKLIST_ENTRY(node, struct HardwareDev, dev_link);
+
+ if(!strcmp(device->dev_name, device_name)) {
+ return device;
+ }
+ }
+
+ KPrintf("BusFindDevice cannot find the %s device.return NULL\n", device_name);
+ return NONE;
+}
+```
+
+* 打开DEVICE函数
+```c
+/**
+* @Description: support to open dev
+* @param dev - dev pointer
+* @return successful:EOK,failed:ERROR
+*/
+uint32 BusDevOpen(struct HardwareDev *dev)
+{
+ NULL_PARAM_CHECK(dev);
+
+ x_err_t ret = EOK;
+
+ if (dev->dev_done->open) {
+ ret = dev->dev_done->open(dev);
+ if(ret) {
+ KPrintf("BusDevOpen error ret %u\n", ret);
+ return ERROR;
+ }
+ }
+
+ return ret;
+}
+```
+
+* 关闭DEVICE函数
+```c
+/**
+* @Description: support to close dev
+* @param dev - dev pointer
+* @return successful:EOK,failed:ERROR
+*/
+uint32 BusDevClose(struct HardwareDev *dev)
+{
+ NULL_PARAM_CHECK(dev);
+
+ x_err_t ret = EOK;
+
+ if (dev->dev_done->close) {
+ ret = dev->dev_done->close(dev);
+ if(ret) {
+ KPrintf("BusDevClose error ret %u\n", ret);
+ return ERROR;
+ }
+ }
+
+ return ret;
+}
+```
+
+* DEVICE写函数
+```c
+/**
+* @Description: support to write data to dev
+* @param dev - dev pointer
+* @param write_param - BusBlockWriteParam
+* @return successful:EOK,failed:NONE
+*/
+uint32 BusDevWriteData(struct HardwareDev *dev, struct BusBlockWriteParam *write_param)
+{
+ NULL_PARAM_CHECK(dev);
+
+ if (dev->dev_done->write) {
+ return dev->dev_done->write(dev, write_param);
+ }
+
+ return EOK;
+}
+```
+
+* DEVICE读函数
+```c
+/**
+* @Description: support to read data from dev
+* @param dev - dev pointer
+* @param read_param - BusBlockReadParam
+* @return successful:EOK,failed:NONE
+*/
+uint32 BusDevReadData(struct HardwareDev *dev, struct BusBlockReadParam *read_param)
+{
+ NULL_PARAM_CHECK(dev);
+
+ if (dev->dev_done->read) {
+ return dev->dev_done->read(dev, read_param);
+ }
+
+ return EOK;
+}
+```
+
+* DRIVER配置函数
+```c
+/**
+* @Description: support to configure drv, include OPE_CFG and OPE_INT
+* @param drv - drv pointer
+* @param configure_info - BusConfigureInfo
+* @return successful:EOK,failed:NONE
+*/
+uint32 BusDrvConfigure(struct Driver *drv, struct BusConfigureInfo *configure_info)
+{
+ NULL_PARAM_CHECK(drv);
+ NULL_PARAM_CHECK(configure_info);
+
+ x_err_t ret = EOK;
+
+ if (drv->configure) {
+ ret = drv->configure(drv, configure_info);
+ if(ret) {
+ KPrintf("BusDrvCfg error, ret %u\n", ret);
+ return ERROR;
+ }
+ }
+
+ return ret;
+}
+```
diff --git a/docs/doc/component/imagesrc/spi_bus.png b/docs/doc/component/imagesrc/spi_bus.png
new file mode 100644
index 0000000..81b6d9f
Binary files /dev/null and b/docs/doc/component/imagesrc/spi_bus.png differ
## 关键数据结构
-* struct xs_Bus结构
+* struct Bus结构
```c
-struct xs_Bus {
- char Bus_name[XS_NAME_MAX]; /* name of bus */
- enum xs_BusType type; /* type of bus */
- enum xs_BUSSTATE flag;
- list_head device;
- list_head driver;
- int (*match)(const struct xs_DeviceDriver * drv,const struct xs_Device dev);
- int (*probe)(void * bus);
- int (*remove)(void * bus);
- int (*shutdown)(void * bus);
- int (*resume)(void * bus);
+struct Bus
+{
+ int8 bus_name[NAME_NUM_MAX];
+ enum BusType bus_type;
+ enum BusState bus_state;
- int (bus_register)(void * bus);
- int (bus_unregister)(void * bus);
- void * private_data;
-};
-```
-Bus_name成员是一个可读的名字,用于唯一标识一个xs_Bus结构,
-type成员表示该xs_Bus为什么类型的总线,用一个枚举变量表示。
-```c
-enum xs_BusType {
- XS_IIC_BUS = 0, /* IIC */
- XS_SPI_BUS, /* SPI */
- XS_USB_BUS, /* USB */
- XS_CAN_BUS, /* CAN */
- /* ...... */
- XS_BUS_END,
-};
-```
-xs_BusType成员表示不同的总线类型,其具体定义在上文给出。
+ int32 (*match)(struct Driver *driver, struct HardwareDev *device);
+ int bus_lock;
-* enum Bus_priority枚举结构
-```c
-enum Bus_priority{
- PriorityLevelOne = 1,
- PriorityLevelTwo,
- PriorityLevelThree,
- PriorityLevelforth,
- PriorityLevelFive,
- PriorityLevelSix,
- PriorityLevelSeven
-};
-```
-Bus_priority变量表示总线优先级,数值越低优先级越高
-
-
-* struct xs_IIC_bus结构
-```c
-struct xs_I2CBus {
- struct xs_Bus bus; /* Basic properties of the bus */
- unsigned int speed; /* IIC communication rate*/
-};
-```
-speed成员记录I2C总线与传感器设备通信的速率
-
-* struct xs_SPIBus结构
-```c
-struct xs_SPIBus {
- struct xs_Bus bus; /* Basic properties of the bus */
- enum Bus_priority priority /* Bus priority */
- unsigned char CPHA; /* SPI clock phase*/
- unsigned char CPOL; /* SPI clock polarity*/
-};
-```
-CPHA成员记录SPI总线的时钟相位,CPOL成员记录SPI总线的时钟极性
-
-* struct xs_CANBus结构
-```c
-struct xs_CAN_bus {
- struct xs_Bus bus; /* Basic properties of the bus */
- enum Bus_priority priority /* Bus priority */
- unsigned int speed; /* CAN communication rate*/
-};
-```
-
-* struct xs_USBBus结构
-```c
-struct xs_USB_bus {
- struct xs_Bus bus; /* Basic properties of the bus */
- enum Bus_priority priority /* Bus priority */
- unsigned int speed; /* USB communication rate*/
-};
-```
-
-
-* struct xs_Device结构
-```c
-typedef struct xs_Device {
- char dev_name[XS_NAME_MAX]; /* name of device */
- enum xs_DeviceType type;
- struct mutex mut; /* Mutually Exclusive Semaphore*/
- xs_uint32 ref_count; /* the number of open */
- void * driver; /* Mounted driver*/
- struct device_ops ops; /* Device operation function set */
- struct xs_Device * prev;
- struct xs_Device * next;
- void * data;
- };
-};
-typedef struct xs_Device * xs_DevicePointer ;
-```
-
-
-
-* struct device_ops结构
-```c
- struct device_ops{
- int (*init)(struct xs_Device * dev);
- int (*open)(struct xs_Device * dev);
- int (*close)(struct xs_Device * dev);
- int (*read)(struct xs_Device * dev, void * buf, int unm);
- int (*write)(struct xs_Device * dev, void *buf, int num);
- int (*ioctl)(struct xs_Device * dev, int cmd);
- }
-```
-device_ops包含统一的、类似文件系统的API,用于对具体外设进行实际的数据读写。如在使用一个传感器前后需要打开(open)/关闭(close)该传感器,read、write分别用与从传感器接收数据与向传感器发送数据,ioctl用于配置传感器属性(如波特率)
-
-* struct xs_HardwareDev结构
-```c
-struct xs_HardwareDev{
- struct xs_Device dev;
- struct device_ops ops;
-
- int (*probe)(struct xs_Device * dev);
- int (*remove)(struct xs_Device * dev);
- void (*shutdown)(struct xs_Device * dev);
- int (*suspend)(struct xs_Device * dev, int state);
- int (*resume)(struct xs_Device * dev);
-};
-```
-
-* struct IICHardwareDevice结构
-```c
- struct IICHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short IIC_addr;
- void * PrivData;
- }
-```
-
-* struct SPIHardwareDevice结构
-```c
- struct SPIHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short SPI_addr;
- void * PrivData;
- }
-```
-
-* struct CANHardwareDevice结构
-```c
- struct CANHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short CAN_addr;
- void * PrivData;
- }
-```
-
-* struct USBHardwareDevice结构
-```c
- struct USBHardwareDevice{
- struct xs_HardwareDev hardware;
- unsigned short USB_addr;
- void * PrivData;
- }
-```
-
-
-* struct xs_DeviceDriver结构
- ```c
-struct xs_DeviceDriver{
- char driver_name[XS_NAME_MAX];
- struct bus_type * bus;
- enum driver_state falg;
+ struct HardwareDev *owner_haldev;
+ struct Driver *owner_driver;
- int (*add)(struct xs_DeviceDriver *dev);
- int (*remove)(struct xs_DeviceDriver *dev);
- int (*probe)(struct xs_HardwareDev *dev);
- void (*shutdown)(struct xs_HardwareDev *dev);
- struct list_drv{
- struct xs_DeviceDriver * prev;
- struct xs_DeviceDriver * next;
- void * data;
- };
-} Device_driver_head;
- ```
+ void *private_data;
+ /*manage the drv of the bus*/
+ uint8 driver_cnt;
+ uint8 bus_drvlink_flag;
+ DoubleLinklistType bus_drvlink;
+
+ /*manage the dev of the bus*/
+ uint8 haldev_cnt;
+ uint8 bus_devlink_flag;
+ DoubleLinklistType bus_devlink;
+
+ uint8 bus_cnt;
+ uint8 bus_link_flag;
+ DoubleLinklistType bus_link;
+};
+```
+* enum BusType枚举结构
+```c
+enum BusType
+{
+ TYPE_I2C_BUS = 0,
+ TYPE_SPI_BUS,
+ TYPE_HWTIMER_BUS,
+ TYPE_USB_BUS,
+ TYPE_CAN_BUS,
+ TYPE_WDT_BUS,
+ TYPE_SDIO_BUS,
+ TYPE_TOUCH_BUS,
+ TYPE_LCD_BUS,
+ TYPE_PIN_BUS,
+ TYPE_RTC_BUS,
+ TYPE_SERIAL_BUS,
+ TYPE_BUS_END,
+};
+```
+
+* enum BusState枚举结构
+```c
+enum BusState
+{
+ BUS_INIT = 0,
+ BUS_INSTALL,
+ BUS_UNINSTALL,
+};
+```
+* struct HardwareDev结构
+```c
+struct HardwareDev
+{
+ int8 dev_name[NAME_NUM_MAX];
+ enum DevType dev_type;
+ enum DevState dev_state;
+
+ const struct HalDevDone *dev_done;
+
+ int (*dev_recv_callback) (void *dev, x_size_t length);
+ int (*dev_block_control) (struct HardwareDev *dev, struct HalDevBlockParam *block_param);
+
+ struct Bus *owner_bus;
+ void *private_data;
+
+ int32 dev_sem;
+
+ DoubleLinklistType dev_link;
+};
+```
+* struct HalDevDone结构
+```c
+struct HalDevDone
+{
+ uint32 (*open) (void *dev);
+ uint32 (*close) (void *dev);
+ uint32 (*write) (void *dev, struct BusBlockWriteParam *write_param);
+ uint32 (*read) (void *dev, struct BusBlockReadParam *read_param);
+};
+```
+HalDevDone包含统一的、类似文件系统的API,用于对具体外设进行实际的开关和数据读写。如在使用一个外设前后需要打开(open)/关闭(close)该外设,read、write分别用与从外设接收数据与向外设发送数据。
+* struct Driver结构
+ ```c
+struct Driver
+{
+ int8 drv_name[NAME_NUM_MAX];
+ enum DriverType driver_type;
+ enum DriverState driver_state;
+
+ uint32 (*configure)(void *drv, struct BusConfigureInfo *configure_info);
+
+ struct Bus *owner_bus;
+ void *private_data;
+
+ DoubleLinklistType driver_link;
+};
+```
+回调函数configure用于对具体外设进行实际的配置。
## 使用场景
-在获取i2c数据前,要匹配设备驱动,在设备驱动打开后对设备进行读写。使用完毕后,关闭设备驱动。
+在获取外设数据前,要先获取外设bus,匹配driver和device数据结构,若有需要应配置外设driver,在外设device打开后对外设进行读写,使用完毕后,关闭设备。
-完整的使用过程示例如下:
+以SERIAL为例,完整的使用过程示例如下:
```c
int main(int argc, char *argv[])
{
- int ret;
- struct xs_I2cDevice *dev;
+ int ret = EOK;
+ char test_str[] = "Hello AIIT!\r\n";
- /* find the i2c device instance */
- dev = (struct xs_I2cDevice*)xs_DeviceFind("i2c_temp",XS_IIC_BUS); //获取设备句柄
- if(dev == NULL)
- {
- xs_kprintf("find iic device error\n");
+ struct Bus *bus;
+ struct HardwareDev *dev;
+ struct Driver *drv;
+
+ /* find the serial bus pointer */
+ bus = BusFind(SERIAL_BUS_NAME);
+ if (NONE == bus) {
+ KPrintf("BusFind %s failed\n", SERIAL_BUS_NAME);
+ return ERROR;
+ }
+
+ /* find the serial driver pointer */
+ drv = BusFindDriver(bus, SERIAL_DRV_NAME);
+ if (NONE == drv) {
+ KPrintf("BusFindDriver %s failed\n", SERIAL_DRV_NAME);
+ return ERROR;
+ }
+
+ /* find the serial device pointer */
+ dev = BusFindDevice(bus, SERIAL_DEVICE_NAME);
+ if (NONE == dev) {
+ KPrintf("BusFindDevice %s failed\n", SERIAL_DEVICE_NAME);
+ return ERROR;
}
- /* open the device instance */
- ret = xs_DeviceOpen(dev); //打开设备
- XS_ASSERT(ret == XS_EOK);
+ /*step 1: init bus_driver, change struct SerialCfgParam if necessary*/
+ struct SerialCfgParam serial_cfg;
+ memset(&serial_cfg, 0, sizeof(struct SerialCfgParam));
+ configure_info.configure_cmd = OPE_INT;
+ configure_info.private_data = &serial_cfg;
+ ret = BusDrvConfigure(drv, &configure_info);
+ if (EOK != ret) {
+ KPrintf("BusDrvConfigure OPE_INT failed error code %d\n", ret);
+ return ret;
+ }
- /* read temperature sensor data for 5 times */
- for (int i = 0; i < 5; i++)
- xs_kprintf("Current CO2 concentration is %u ppm\n", xs_DeviceRead(dev)); //读取设备数据
- xs_DeviceClose(dev); //关闭数据
+ /*step 2: match serial bus_driver with bus_device*/
+ bus->match(drv, dev);
- return 0;
+ /*step 3: open bus_device, configure struct SerialDevParam if necessary*/
+ serial_dev_param->serial_set_mode = SIGN_OPER_INT_RX;
+ serial_dev_param->serial_stream_mode = SIGN_OPER_STREAM;
+ ret = BusDevOpen(dev);
+ if (EOK != ret) {
+ KPrintf("BusDevOpen failed error code %d\n", ret);
+ return ret;
+ }
+
+ /*step 4: write serial data, configure struct BusBlockWriteParam*/
+ struct BusBlockWriteParam write_param;
+ write_param.pos = 0;
+ write_param.buffer = (void *)test_str;
+ write_param.size = sizeof(test_str) - 1;
+ BusDevWriteData(bus_device, &write_param);
+
+ /*step 5: close bus_device*/
+ BusDevClose(bus_device);
+
+ return EOK;
}
```
-
-
-
## 函数接口
-### 设备初始化函数
+* BUS注册函数
```c
/**
- * This function will initialize the specified device
- *
- * @param dev the pointer of device driver structure
- *
- * @return the result
- */
-xs_err_t xs_DeviceInit(xs_DevicePointer dev)
-{
- xs_err_t result = XS_EOK;
-
- XS_ASSERT(dev != XS_NULL);
-
- /*driver init*/
- if(dev->driver && dev->driver->flag & DRIVER_FLAG_MOUNTED){
- device_register(dev)
- if (!(dev->flag & DEVICE_FLAG_ACTIVATED))
- {
- result = device_init(dev);/* Macro */
- if (result != XS_EOK)
- {
- xs_kprintf("Initialize device:%s failed. The error code is %d\n",
- dev->name, result);
- }
- else
- {
- dev->flag |= XS_DEVICE_FLAG_ACTIVATED;
- }
- }
-
- }else{
- return DRIVER_ERROR;
- }
-
- return result;
-}
-```
-
-### 设备查找函数
-
-```c
-/**
- * This function finds a device driver by specified name.
- */
-xs_DevicePointer xs_DeviceFind(const char *name)
-{
- enum xs_BusType e;
- xs_DevicePointer dev;
- for(e=0;e !=XS_BUS_END; ++e){
- if(dev = __xs_DeviceFind_by_type(name,e) && dev !=BUS_ERROR)
- return dev;
- }
- return NULL;
-}
-
-xs_DevicePointer xs_DeviceFind(const char *name,enum xs_BusType bus_type){
- return __xs_DeviceFind_by_type(name,bus_type);
-};
-
-xs_DevicePointer __xs_DeviceFind_by_type(const char *name,enum xs_BusType bus_type)
-{
- struct xs_Device *device;
- struct xs_ListNode *node;
-
- xs_Bus bus = get_bus_from_type(bus_type);
- if(!(bus && bus->falg = BUS_FLAG_ACTIVED))
- return BUS_ERROR;/*a point to speical area */
-
- /* enter critical */
- if (xs_get_kthread_descriptor() != XS_NULL)
- xs_critical_enter();
-
- /* try to find device */
- for (node = bus->device.next;
- node != &(bus->device);
- node = node->next)
- {
- device = xs_list_entry(node, struct xs_Device, list);
- if (xs_strncmp(device->name, name, XS_NAME_MAX) == 0)
- {
- /* leave critical */
- if (xs_get_kthread_descriptor() != XS_NULL)
- xs_critical_exit();
-
- return (xs_DevicePointer)device;
- }
- }
-
- /* leave critical */
- if (xs_get_kthread_descriptor() != XS_NULL)
- xs_critical_exit();
-
- /* not found */
- return XS_NULL;
-}
-
-```
-### 设备打开函数
-```c
-
-/*
-* This function open a device
+* @Description: support to register bus pointer with linklist
+* @param bus - bus pointer
+* @return successful:EOK,failed:NONE
*/
-xs_err_t xs_DeviceOpen(xs_DevicePointer dev)
+int BusRegister(struct Bus *bus)
{
- xs_err_t result = XS_EOK;
+ x_err_t ret = EOK;
+ NULL_PARAM_CHECK(bus);
- XS_ASSERT(dev != XS_NULL);
- if(!(dev->bus))
- return BUS_ERROR;
- if(!(dev->driver && dev->bus->match(dev->driver,dev)))
- return DRIVER_ERROR;
+ bus->match = BusMatchDrvDev;
- /* if device is not initialized, initialize it. */
- if (!(dev->flag & DEVICE_FLAG_ACTIVATED))
- {
- xs_DeviceInit(dev);
- }
+ BusLinkInit(bus);
- /* call device_open interface */
- if (device_open != XS_NULL)
- {
- result = device_open(dev, oflag);
- dev->ref_count++;
- XS_ASSERT(dev->ref_count != 0);
- }
- return result;
-}
-```
-### 设备关闭函数
+ bus->bus_lock = KMutexCreate();
-```c
-xs_err_t xs_DeviceClose(xs_DevicePointer dev)
-{
- xs_err_t result = XS_EOK;
+ DoubleLinkListInsertNodeAfter(&bus_linklist, &(bus->bus_link));
- XS_ASSERT(dev != XS_NULL);
-
- if (dev->ref_count == 0)
- return XS_ERROR;
-
- dev->ref_count--;
-
- if (dev->ref_count != 0)
- return XS_EOK;
-
- /* call device_close interface */
- if (device_close != XS_NULL)
- {
- result = device_close(dev);
-
- }
-
-
- return result;
+ return ret;
}
```
-
-
-## i2c设备注册与卸载
+* BUS删除函数
```c
-int int xs_I2cDeviceRegister(struct xs_I2cDevice *dev,const char *name, xs_uint16 flags);
-int xs_I2cDeviceunRegister(struct xs_I2cDevice *dev);
+/**
+* @Description: support to unregister bus pointer and delete its linklist node
+* @param bus - bus pointer
+* @return successful:EOK,failed:NONE
+*/
+int BusUnregister(struct Bus *bus)
+{
+ NULL_PARAM_CHECK(bus);
+ bus->bus_cnt--;
+
+ DoubleLinkListRmNode(&(bus->bus_link));
+
+ return EOK;
+}
```
-### xs_I2cDeviceRegister函数具体实现
+* DRIVER注册到BUS函数
```c
-int xs_I2cDeviceRegister(struct xs_I2cDevice *dev,const char *name, xs_uint16 flags)
+/**
+* @Description: support to register driver pointer to bus pointer
+* @param bus - bus pointer
+* @param driver - driver pointer
+* @return successful:EOK,failed:NONE
+*/
+int DriverRegisterToBus(struct Bus *bus, struct Driver *driver)
{
- if(dev != NULL)
- {
- return xs_DeviceRegister(dev,name,0);
- }
- return -XS_ERROR;
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(driver);
+
+ driver->owner_bus = bus;
+ bus->driver_cnt++;
+
+ DoubleLinkListInsertNodeAfter(&bus->bus_drvlink, &(driver->driver_link));
+
+ return EOK;
}
+```
-xs_err_t xs_DeviceRegister(void * dev,const char *name, xs_uint16 flags)
+* DRIVER从BUS中删除函数
+```c
+/**
+* @Description: support to delete driver pointer from bus pointer
+* @param bus - bus pointer
+* @param driver - driver pointer
+* @return successful:EOK,failed:NONE
+*/
+int DriverDeleteFromBus(struct Bus *bus, struct Driver *driver)
{
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(driver);
- if (dev == XS_NULL)
- return -XS_ERROR;
+ bus->driver_cnt--;
- if (xs_DeviceFind(name) != XS_NULL)
- return -XS_ERROR;
+ DoubleLinkListRmNode(&(driver->driver_link));
- xs_CriticalEnter();
- for (node = Device_driver_head.NodeNext;
- node != &(xiaoshan_device_head);
- node = node->NodeNext)
+ free(driver);
+
+ return EOK;
+}
+```
+
+* DEVICE注册到BUS函数
+```c
+/**
+* @Description: support to register dev pointer to bus pointer
+* @param bus - bus pointer
+* @param device - device pointer
+* @return successful:EOK,failed:NONE
+*/
+int DeviceRegisterToBus(struct Bus *bus, struct HardwareDev *device)
+{
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(device);
+
+ device->owner_bus = bus;
+ bus->haldev_cnt++;
+
+ DoubleLinkListInsertNodeAfter(&bus->bus_devlink, &(device->dev_link));
+
+ return EOK;
+}
+```
+
+* DEVICE从BUS中删除函数
+```c
+/**
+* @Description: support to delete dev pointer from bus pointer
+* @param bus - bus pointer
+* @param device - device pointer
+* @return successful:EOK,failed:NONE
+*/
+int DeviceDeleteFromBus(struct Bus *bus, struct HardwareDev *device)
+{
+ NULL_PARAM_CHECK(bus);
+ NULL_PARAM_CHECK(device);
+
+ bus->haldev_cnt--;
+
+ DoubleLinkListRmNode(&(device->dev_link));
+
+ free(device);
+
+ return EOK;
+}
+```
+
+* 查找BUS函数
+```c
+/**
+* @Description: support to find bus pointer by bus name
+* @param bus_name - bus name
+* @return successful:bus pointer,failed:NONE
+*/
+BusType BusFind(const char *bus_name)
+{
+ struct Bus *bus = NONE;
+
+ DoubleLinklistType *node = NONE;
+ DoubleLinklistType *head = &bus_linklist;
+
+ for (node = head->node_next; node != head; node = node->node_next)
{
- struct xs_Device *device;
-
- device = XS_DOUBLE_LINKLIST_ENTRY(node, struct xs_Device, link);
- if (device)
- {
- XS_ASSERT(device != dev);
+ bus = SYS_DOUBLE_LINKLIST_ENTRY(node, struct Bus, bus_link);
+ if(!strcmp(bus->bus_name, bus_name)) {
+ return bus;
}
}
- xs_CriticalExit();
- xs_strncpy(dev->dev_string, name, XS_NAME_MAX);
- register xs_base temp = xs_DisableHwInterrupt();
- {
- xs_DoubleLinkListInsertNodeAfter(&xiaoshan_device_head, &(dev->link));
- }
- xs_EnableHwInterrupt(temp);
- dev->sign = flags;
- dev->call_cnt = 0;
- dev->status = 0;
- xs_InitWqueue(&(dev->wait_queue));
- return XS_EOK;
+
+ KPrintf("BusFind cannot find the %s bus.return NULL\n", bus_name);
+ return NONE;
}
```
+
+* 查找DRIVER函数
+```c
+/**
+* @Description: support to find driver pointer of certain bus by driver name
+* @param bus - bus pointer
+* @param driver_name - driver name
+* @return successful:EOK,failed:NONE
+*/
+DriverType BusFindDriver(struct Bus *bus, const char *driver_name)
+{
+ NULL_PARAM_CHECK(bus);
+ struct Driver *driver = NONE;
+
+ DoubleLinklistType *node = NONE;
+ DoubleLinklistType *head = &bus->bus_drvlink;
+
+ for (node = head->node_next; node != head; node = node->node_next)
+ {
+ driver = SYS_DOUBLE_LINKLIST_ENTRY(node, struct Driver, driver_link);
+ if(!strcmp(driver->drv_name, driver_name)) {
+ return driver;
+ }
+ }
+
+ KPrintf("BusFindDriver cannot find the %s driver.return NULL\n", driver_name);
+ return NONE;
+}
+```
+
+* 查找DEVICE函数
+```c
+/**
+* @Description: support to find device pointer of certain bus by device name
+* @param bus - bus pointer
+* @param device_name - device name
+* @return successful:EOK,failed:NONE
+*/
+HardwareDevType BusFindDevice(struct Bus *bus, const char *device_name)
+{
+ NULL_PARAM_CHECK(bus);
+ struct HardwareDev *device = NONE;
+
+ DoubleLinklistType *node = NONE;
+ DoubleLinklistType *head = &bus->bus_devlink;
+
+ for (node = head->node_next; node != head; node = node->node_next)
+ {
+ device = SYS_DOUBLE_LINKLIST_ENTRY(node, struct HardwareDev, dev_link);
+
+ if(!strcmp(device->dev_name, device_name)) {
+ return device;
+ }
+ }
+
+ KPrintf("BusFindDevice cannot find the %s device.return NULL\n", device_name);
+ return NONE;
+}
+```
+
+* 打开DEVICE函数
+```c
+/**
+* @Description: support to open dev
+* @param dev - dev pointer
+* @return successful:EOK,failed:ERROR
+*/
+uint32 BusDevOpen(struct HardwareDev *dev)
+{
+ NULL_PARAM_CHECK(dev);
+
+ x_err_t ret = EOK;
+
+ if (dev->dev_done->open) {
+ ret = dev->dev_done->open(dev);
+ if(ret) {
+ KPrintf("BusDevOpen error ret %u\n", ret);
+ return ERROR;
+ }
+ }
+
+ return ret;
+}
+```
+
+* 关闭DEVICE函数
+```c
+/**
+* @Description: support to close dev
+* @param dev - dev pointer
+* @return successful:EOK,failed:ERROR
+*/
+uint32 BusDevClose(struct HardwareDev *dev)
+{
+ NULL_PARAM_CHECK(dev);
+
+ x_err_t ret = EOK;
+
+ if (dev->dev_done->close) {
+ ret = dev->dev_done->close(dev);
+ if(ret) {
+ KPrintf("BusDevClose error ret %u\n", ret);
+ return ERROR;
+ }
+ }
+
+ return ret;
+}
+```
+
+* DEVICE写函数
+```c
+/**
+* @Description: support to write data to dev
+* @param dev - dev pointer
+* @param write_param - BusBlockWriteParam
+* @return successful:EOK,failed:NONE
+*/
+uint32 BusDevWriteData(struct HardwareDev *dev, struct BusBlockWriteParam *write_param)
+{
+ NULL_PARAM_CHECK(dev);
+
+ if (dev->dev_done->write) {
+ return dev->dev_done->write(dev, write_param);
+ }
+
+ return EOK;
+}
+```
+
+* DEVICE读函数
+```c
+/**
+* @Description: support to read data from dev
+* @param dev - dev pointer
+* @param read_param - BusBlockReadParam
+* @return successful:EOK,failed:NONE
+*/
+uint32 BusDevReadData(struct HardwareDev *dev, struct BusBlockReadParam *read_param)
+{
+ NULL_PARAM_CHECK(dev);
+
+ if (dev->dev_done->read) {
+ return dev->dev_done->read(dev, read_param);
+ }
+
+ return EOK;
+}
+```
+
+* DRIVER配置函数
+```c
+/**
+* @Description: support to configure drv, include OPE_CFG and OPE_INT
+* @param drv - drv pointer
+* @param configure_info - BusConfigureInfo
+* @return successful:EOK,failed:NONE
+*/
+uint32 BusDrvConfigure(struct Driver *drv, struct BusConfigureInfo *configure_info)
+{
+ NULL_PARAM_CHECK(drv);
+ NULL_PARAM_CHECK(configure_info);
+
+ x_err_t ret = EOK;
+
+ if (drv->configure) {
+ ret = drv->configure(drv, configure_info);
+ if(ret) {
+ KPrintf("BusDrvCfg error, ret %u\n", ret);
+ return ERROR;
+ }
+ }
+
+ return ret;
+}
+```
diff --git a/docs/doc/component/imagesrc/spi_bus.png b/docs/doc/component/imagesrc/spi_bus.png
new file mode 100644
index 0000000..81b6d9f
Binary files /dev/null and b/docs/doc/component/imagesrc/spi_bus.png differ